Neuroni, Caos e Ordine: Svelati i Segreti della Stabilità nelle Reti Neurali!
Ciao a tutti! Sono qui per raccontarvi un po’ del mio viaggio (e di quello di tanti colleghi ricercatori) nel mondo affascinante e complesso delle reti neurali. Immaginate il cervello: miliardi di neuroni che comunicano, creano pensieri, ricordi, azioni. Come possiamo iniziare a capire questa incredibile macchina? Beh, un modo è creare dei modelli matematici, delle versioni semplificate che cercano di catturare l’essenza del comportamento neuronale. Oggi vi parlo di uno di questi modelli, il cosiddetto NNLIF (Nonlinear Noisy Leaky Integrate-and-Fire), e delle scoperte che abbiamo fatto sul suo comportamento a lungo termine.
Il Modello NNLIF: Un Ritratto Matematico dei Neuroni
Ok, “Nonlinear Noisy Leaky Integrate-and-Fire” suona complicato, lo so! Ma cerchiamo di scomporlo. In pratica, questo modello descrive come cambia nel tempo la “densità di probabilità” di trovare i neuroni di una popolazione a un certo “voltaggio” di membrana. Pensate al voltaggio come a un livello di carica elettrica.
Ecco come funziona, in soldoni:
- Integrate-and-Fire (Integra e Scarica): Ogni neurone accumula segnali in ingresso (integra), aumentando il suo voltaggio. Quando raggiunge una soglia (chiamata V_F, Firing Threshold), il neurone “spara” un segnale (fa “spike”) e il suo voltaggio viene immediatamente resettato a un valore più basso (V_R, Reset Value).
- Leaky (Dispersivo): Se non riceve abbastanza stimoli, il voltaggio del neurone tende a “disperdersi”, tornando verso un valore di riposo.
- Noisy (Rumoroso): Il modello include un elemento di casualità, un “rumore”, che rende il comportamento più realistico, simile a quello biologico.
- Nonlinear (Non Lineare): Qui sta il bello (e il difficile!). I neuroni non sono isolati, ma connessi in una rete. L’attività di un neurone influenza gli altri. Questa interazione è rappresentata da un termine non lineare nell’equazione, che dipende dalla frequenza di scarica (N_p(t)) dell’intera popolazione.
Due parametri chiave governano questa interazione:
- La Forza di Connettività (b): Ci dice se la rete è, in media, eccitatoria (b > 0, i neuroni si stimolano a vicenda) o inibitoria (b < 0, i neuroni si frenano a vicenda). Se b = 0, i neuroni sono indipendenti.
- Il Ritardo di Trasmissione (d): C’è un piccolo ritardo (d ≥ 0) tra quando un neurone spara e quando il suo segnale raggiunge gli altri. Questo ritardo può cambiare drasticamente il comportamento della rete!
Il nostro modello è descritto da un’equazione matematica chiamata equazione di Fokker-Planck non lineare. L’obiettivo è capire come la distribuzione dei voltaggi dei neuroni (la funzione p(v,t)) evolve nel tempo.
Equilibri: La Quiete (Forse) Dopo la Tempesta
Una domanda fondamentale è: cosa succede alla rete dopo molto tempo? Si stabilizza? Oscilla? Esplode in un’attività frenetica? Per rispondere, cerchiamo gli “stati stazionari” o “equilibri” (p_∞(v)). Sono delle configurazioni in cui la distribuzione dei voltaggi non cambia più nel tempo. La rete ha raggiunto una sorta di stabilità.
Trovare questi equilibri è già interessante. Si scopre che il numero di equilibri possibili dipende proprio dalla forza di connettività b:
- Se la rete è inibitoria (b ≤ 0), c’è sempre un solo equilibrio.
- Se la rete è eccitatoria (b > 0), le cose si complicano:
- Se b è piccolo, c’è ancora un solo equilibrio.
- Per valori intermedi di b, possono esistere due equilibri (uno con bassa attività, uno con alta attività).
- Se b è molto grande, potrebbero non esserci equilibri!
Possiamo visualizzare questo guardando una funzione matematica specifica (chiamata 1/I(N)). Gli equilibri corrispondono ai punti in cui questa funzione incrocia la diagonale. Vedere come cambia la curva al variare di b ci fa capire quanti equilibri ci sono. Ma avere un equilibrio non basta: dobbiamo sapere se è stabile! Un equilibrio stabile è come una biglia in fondo a una conca: se la sposti un po’, torna al suo posto. Un equilibrio instabile è come una biglia in cima a una collina: basta un soffio per farla rotolare via.
Cosa Sapevamo (e Immaginavamo) Prima
Prima del nostro lavoro, c’erano molte idee e simulazioni numeriche su cosa dovesse succedere nel modello NNLIF, ma poche certezze matematiche rigorose. Ecco il quadro delle aspettative:
- Blow-up (Esplosione): Se la connettività eccitatoria b è forte e non c’è ritardo (d=0), la frequenza di scarica N_p(t) può diventare infinita in tempo finito. La rete “esplode”. Questo fenomeno sparisce se introduciamo un ritardo (d > 0).
- Distribuzione a Plateau: Se b è molto grande (tanto da non avere equilibri) e c’è ritardo (d > 0), ci si aspetta che la rete converga a una distribuzione uniforme dei voltaggi tra V_R e V_F (la “plateau distribution”).
- Due Equilibri (b > 0 intermedio): Ci si aspettava che l’equilibrio con attività più alta fosse sempre instabile, mentre quello con attività più bassa fosse stabile, indipendentemente dal ritardo d.
- Un Equilibrio (b piccolo o negativo): Per b positivo ma piccolo, o per b negativo ma non troppo, ci si aspettava che l’unico equilibrio fosse stabile per qualsiasi ritardo d.
- Oscillazioni Periodiche: La cosa più intrigante! Per b molto negativo (forte inibizione) e ritardo d sufficientemente grande, ci si aspettava che l’equilibrio diventasse instabile e che la rete iniziasse a oscillare, entrando in un ciclo periodico.
Molte di queste erano congetture basate su simulazioni o modelli approssimati. Mancava una teoria solida, specialmente per valori generici di b e d.
La Nostra Svolta: Un Criterio per Decifrare la Stabilità
Ed è qui che entra in gioco il nostro contributo! Abbiamo cercato di mettere ordine in questo quadro complesso, fornendo strumenti matematici più potenti. La nostra scoperta principale è un nuovo criterio per determinare la stabilità o instabilità lineare di un equilibrio.
Cosa significa “stabilità lineare”? In pratica, studiamo come si comporta il sistema se lo perturbiamo *pochissimo* rispetto all’equilibrio. Se la piccola perturbazione cresce, l’equilibrio è linearmente instabile; se decresce, è linearmente stabile. Spesso (ma non sempre!) la stabilità lineare riflette la stabilità del sistema completo (non lineare).
Il bello del nostro criterio è che:
- È Generale: Funziona per qualsiasi valore della forza di connettività b (sia positiva che negativa) e per qualsiasi valore del ritardo d. Non siamo più limitati a piccole connettività!
- È Controllabile (anche numericamente): Possiamo usare questo criterio per verificare la stabilità in ogni situazione specifica.
- È Legato a una Proprietà Chiara: Sorprendentemente, la stabilità dipende da una quantità ben precisa: la pendenza della curva 1/I(N) nel punto corrispondente all’equilibrio! Ricordate la visualizzazione degli equilibri? È proprio la pendenza in quei punti di incrocio a dirci molto sulla stabilità.
Questo criterio ci ha permesso di confermare (e in alcuni casi, dimostrare per la prima volta rigorosamente) molte delle aspettative precedenti e di creare una mappa completa della stabilità.
Il Potere della Linearizzazione e Oltre
Per arrivare a questo criterio, abbiamo dovuto scavare a fondo nella matematica del problema. Gran parte del lavoro tecnico si è concentrato sullo studio dell’equazione lineare associata al modello NNLIF. Immaginate di “congelare” l’interazione non lineare e studiare come si comporta il sistema lineare risultante. Abbiamo dimostrato proprietà importanti di questo sistema lineare, come l’esistenza di uno “spectral gap” in uno spazio matematico specifico (chiamato X). Questo significa, in parole povere, che le soluzioni dell’equazione lineare convergono esponenzialmente verso il loro equilibrio in questo spazio.
Avere queste solide basi sull’equazione lineare ci ha permesso di fare due cose importanti:
- Collegare Stabilità Lineare e Non Lineare: Abbiamo dimostrato (per il caso senza ritardo, d=0) che se un equilibrio è linearmente stabile, allora è anche non linearmente stabile per perturbazioni iniziali abbastanza piccole. Questo è un risultato cruciale, perché giustifica l’uso dell’analisi lineare per predire il comportamento del sistema reale (non lineare) vicino all’equilibrio. Implica anche che, vicino a un equilibrio stabile, non ci può essere il fenomeno del “blow-up”.
- Estendere i Risultati per Connettività Debole: Abbiamo fornito una nuova prova della stabilità dell’equilibrio unico quando la connettività |b| è piccola, valida per *qualsiasi* ritardo d.
Mappare la Stabilità: Una Guida Visiva
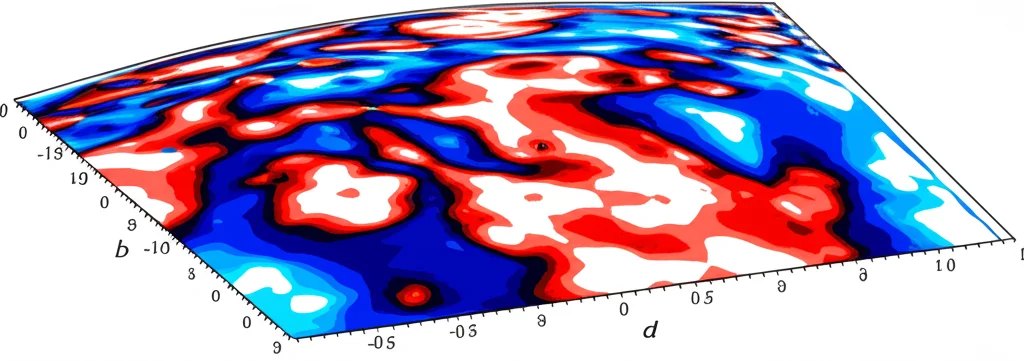
Grazie al nostro criterio generale, abbiamo potuto creare delle “mappe di stabilità”. Immaginate un grafico con la connettività b su un asse e il ritardo d sull’altro. Il nostro criterio ci permette di colorare questa mappa, indicando per ogni coppia (b, d) se l’equilibrio (o l’equilibrio a bassa attività, se ce ne sono due) è stabile o instabile.
Queste mappe (come quelle mostrate nelle Figure 3 e 4 dell’articolo originale) sono potentissime:
- Confermano le Intuizioni: Vediamo chiaramente che per b molto negativo (forte inibizione), esiste un valore critico del ritardo d sopra il quale l’equilibrio diventa instabile. Questa è proprio la regione dove ci aspettiamo le oscillazioni periodiche!
- Mostrano Regioni di Stabilità Incondizionata: C’è una regione di valori di b (positivi piccoli e negativi non troppo grandi) in cui l’equilibrio è stabile indipendentemente dal ritardo d.
- Identificano l’Instabilità dell’Equilibrio Superiore: Quando ci sono due equilibri (per b > 0 intermedio), la mappa conferma che quello con attività più alta è sempre instabile.
Queste mappe forniscono un quadro quasi completo del comportamento a lungo termine del sistema linearizzato, che è un’ottima guida per capire il sistema non lineare completo.
Perché Tutto Questo è Importante?
Capire la stabilità e il comportamento a lungo termine di questi modelli, anche se semplificati, è fondamentale. Ci aiuta a comprendere i meccanismi di base che possono generare diversi regimi di attività nel cervello, come stati stazionari, oscillazioni o risposte rapide a stimoli. Il nostro lavoro fornisce strumenti matematici più robusti per analizzare questi modelli, andando oltre le simulazioni e le approssimazioni. Il criterio basato sulla pendenza di 1/I(N) è particolarmente elegante perché collega direttamente una proprietà matematica facilmente calcolabile (o almeno visualizzabile) al comportamento dinamico complesso della rete.
C’è ancora molta strada da fare, ovviamente. Il cervello è infinitamente più complesso di questi modelli. Ma ogni passo avanti nella comprensione matematica di questi sistemi ci avvicina un po’ di più a svelare i segreti del suo funzionamento. È un’avventura intellettuale incredibile, e spero di avervene trasmesso almeno un pizzico di entusiasmo!
Fonte: Springer