Iride Hi-Tech: Sconfiggere l’Incertezza nel Riconoscimento con la Logica Neutrosofica!
Ciao a tutti, appassionati di tecnologia e scienza! Oggi voglio parlarvi di qualcosa che mi sta davvero a cuore e che, secondo me, rappresenta un passo avanti notevole nel mondo del riconoscimento biometrico, in particolare quello dell’iride. Sapete, l’iride è unica come un’impronta digitale, ma riconoscerla automaticamente tramite immagini non è sempre una passeggiata, specialmente quando ci sono disturbi, il cosiddetto “rumore”.
Il Problema: Immagini “Sporche” e Decisioni Difficili
Immaginate di dover identificare con precisione i confini e le regioni specifiche all’interno di un’immagine dell’iride. Questo processo si chiama segmentazione ed è fondamentale per capire cosa stiamo guardando, classificare l’immagine o rilevare oggetti specifici. È cruciale in tantissimi campi: dalla medicina (pensate alle analisi di immagini mediche) alla sicurezza (riconoscimento biometrico), passando per le immagini satellitari.
Il problema è che le immagini del mondo reale sono raramente perfette. Spesso sono afflitte da rumore (come il rumore Gaussiano o di Poisson, disturbi comuni nelle fotografie digitali) o presentano zone ambigue, sfocate, incerte. I metodi tradizionali di segmentazione, come quelli basati sui contorni (edge detection) o sul clustering (come il K-means), a volte faticano proprio a causa di questa incertezza. Anche le reti neurali, potentissime per carità, richiedono montagne di dati “puliti” e ben etichettati per l’addestramento, oltre a risorse hardware non indifferenti.
Allora come fare? Come possiamo insegnare a una macchina a “vedere” e segmentare correttamente un’immagine anche quando i dati sono imperfetti o ambigui?
La Soluzione Neutrosofica: Abbracciare l’Incertezza
Ecco dove entriamo in gioco noi, con un’idea presa in prestito da un campo affascinante della logica: i set neutrosofici. Forse avete sentito parlare dei set fuzzy (o sfocati), che sono già un passo avanti perché permettono di gestire gradi di appartenenza (un pixel può essere “un po’ ” parte di una regione e “un po’ ” parte di un’altra). Ma i set neutrosofici, introdotti da Florentin Smarandache, fanno ancora di più!
Un set neutrosofico non considera solo il grado di verità (T – quanto un elemento appartiene a un set) e di falsità (F – quanto non appartiene), ma introduce anche un terzo componente fondamentale: il grado di indeterminazione (I). Quest’ultimo cattura proprio l’incertezza, l’ambiguità, il “non so” che spesso caratterizza i dati reali. Pensateci: è perfetto per l’analisi di immagini!
L’idea alla base del nostro lavoro è stata: perché non usare questa capacità dei set neutrosofici di gestire l’incertezza per migliorare la segmentazione delle immagini dell’iride, soprattutto quelle “rumorose”?

Il Nostro Metodo: (mathscr{T}_{1k}) Semantic Segmentation
Abbiamo sviluppato una metodologia che abbiamo chiamato (mathscr{T}_{1k}) semantic segmentation. Non spaventatevi per il nome! L’idea di base è relativamente semplice. Invece di basarci solo sui valori di intensità dei pixel dell’immagine originale, noi prima trasformiamo l’immagine nel dominio neutrosofico. Questo significa che per ogni pixel (o piccola regione) calcoliamo i suoi gradi di Verità (T), Indeterminazione (I) e Falsità (F).
Come li calcoliamo? Generalmente, la Verità (T) è legata all’intensità media locale, l’Indeterminazione (I) alla deviazione standard (una misura della variabilità o “rumorosità” locale) e la Falsità (F) è il complemento della Verità.
Una volta ottenute queste “mappe” neutrosofiche (T, I, F), usiamo le componenti di Verità (T) e Falsità (F) per definire degli intervalli (range) che corrispondono a diverse classi di segmentazione (ecco da dove viene il ‘k’ nel nome: indica il numero di classi). In pratica, stabiliamo delle soglie basate sui valori di T e F per decidere a quale classe appartiene ogni pixel. La cosa interessante è che questo approccio ci permette di fare una segmentazione multi-classe (dividere l’immagine in più di due regioni) tenendo conto implicitamente dell’incertezza catturata dalla componente I.
Abbiamo definito delle funzioni specifiche per calcolare questi intervalli (T range function, F range function) e per assegnare le etichette di segmentazione (T_k segmentation labeling, F_k segmentation labeling). La funzione finale (mathscr{T}_{1k}) combina queste informazioni per produrre la mappa di segmentazione definitiva.
L’Esperimento: Mettiamo alla Prova l’Iride
Per vedere se la nostra idea funzionava davvero, abbiamo condotto degli esperimenti rigorosi. Abbiamo scelto un dataset molto conosciuto e utilizzato nella comunità scientifica: il CASIA V1 Iris Image Database. Questo database contiene centinaia di immagini di iridi reali, catturate in diverse sessioni.
Ma non ci siamo accontentati delle immagini “pulite”. Per simulare condizioni più realistiche e stressare il nostro algoritmo, abbiamo deliberatamente aggiunto del rumore alle immagini: sia rumore Gaussiano (quello che assomiglia un po’ alla “grana” delle vecchie foto) sia rumore di Poisson (tipico delle immagini acquisite con poca luce).
Abbiamo poi applicato il nostro metodo (mathscr{T}_{1k}) a queste immagini rumorose, provando diverse configurazioni:
- Diverse dimensioni delle immagini (32×32, 64×64, 128×128 pixel).
- Diverse dimensioni del “blocco neutrosofico” (h=3, 5, 7, 9 – la dimensione dell’intorno locale usato per calcolare T, I, F).
- Diverso numero di classi di segmentazione (k=3, 4, 5, 6).
- Diversi livelli di rumore Gaussiano (controllati dal parametro (sigma)).
Per valutare i risultati, abbiamo usato metriche standard nel campo della segmentazione:
- Jaccard Index (o IoU – Intersection over Union): Misura la sovrapposizione tra la segmentazione prodotta e quella “vera” (ground truth).
- mIoU (mean IoU): La media dell’IoU su tutte le classi.
- Precision, Recall, F1 Score: Metriche classiche per valutare la classificazione.
- Accuracy: La percentuale generale di pixel classificati correttamente.
I Risultati: Funziona! E Anche Bene!
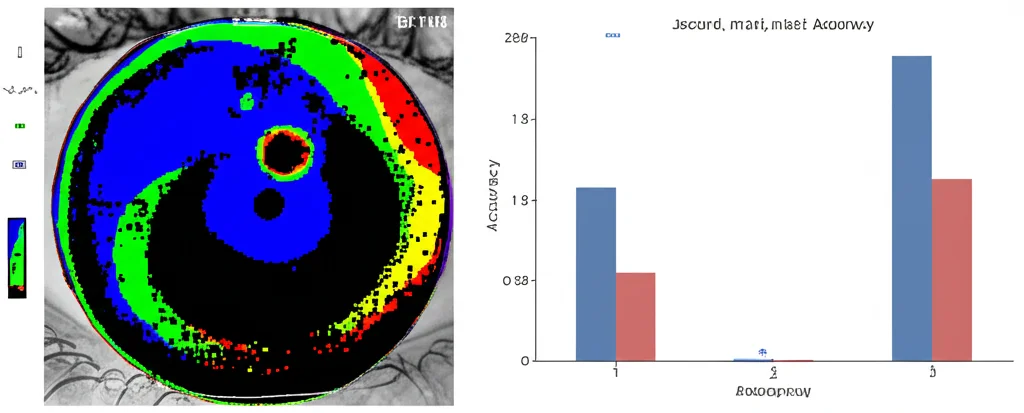
E i risultati? Beh, lasciate che ve lo dica: sono stati davvero incoraggianti! Applicando la nostra metodologia (mathscr{T}_{1k}), siamo riusciti a ottenere punteggi di segmentazione impressionanti, raggiungendo un’accuratezza complessiva intorno all’85% e punteggi Jaccard massimi dell’85% e mIoU dell’80-81% in diverse configurazioni, anche in presenza di rumore significativo!
Abbiamo scoperto alcune cose interessanti dall’analisi dei parametri:
- La dimensione dell’immagine 64×64 pixel sembra essere un ottimo compromesso tra dettaglio e velocità di calcolo per questo compito.
- Un numero di classi di segmentazione pari a k=3 o k=4 sembra essere il più adatto per le immagini dell’iride nel dataset CASIA. Aumentare troppo il numero di classi (k=6) peggiorava le performance, probabilmente perché la struttura dell’iride in quelle immagini non giustifica una suddivisione così fine.
- La dimensione del blocco neutrosofico (h) influisce: blocchi più piccoli (h=3, h=5) permettono un’analisi più dettagliata ma richiedono più tempo; blocchi più grandi (h=7, h=9) sono più veloci ma potrebbero perdere qualche dettaglio fine. Abbiamo trovato che h=9 offriva un buon bilanciamento per la segmentazione a 3 classi sul dataset CASIA, raggiungendo l’85% di score con tempi ridotti.
- Il metodo si è dimostrato robusto a diversi livelli di rumore Gaussiano ((sigma)), anche se, come prevedibile, performance leggermente migliori si ottengono con meno rumore.
- L’analisi con rumore di Poisson ha dato risultati ancora più consistenti, con punteggi molto alti (spesso sopra il 90%) quasi indipendentemente dai parametri, suggerendo che il metodo gestisce particolarmente bene questo tipo di disturbo.
Abbiamo anche confrontato il nostro approccio con altri metodi di segmentazione presenti in letteratura. Mentre alcuni metodi raggiungono accuratezze elevate su dataset specifici, spesso non sono stati testati specificamente sul dataset CASIA con rumore o non sfruttano l’analisi multi-componente (come T, I, F) che offre la neutrosofia. Il nostro metodo (mathscr{T}_{1k}), pur avendo come unica piccola pecca il tempo di calcolo leggermente superiore dovuto all’analisi a tre componenti per blocco, ha dimostrato un leggero miglioramento nelle performance (raggiungendo un picco di accuratezza del 99.21% in alcune configurazioni specifiche, contro il 99.05% di altri metodi sul CASIA) e una solida validazione sui dati di test (84.8% di accuratezza media sul test set CASIA), proprio grazie alla sua capacità di gestire l’incertezza in modo più completo.
Perché è Importante?
Questo lavoro dimostra che abbracciare l’incertezza, invece di combatterla o ignorarla, può portare a risultati migliori nell’analisi delle immagini. L’uso dei set neutrosofici ci fornisce un framework potente per modellare l’ambiguità intrinseca dei dati reali. Nel contesto del riconoscimento dell’iride, una segmentazione più accurata e robusta al rumore significa sistemi biometrici più affidabili e sicuri.
Certo, c’è ancora strada da fare. Una delle sfide è ottimizzare ulteriormente i tempi di calcolo. In futuro, vogliamo esplorare estensioni di questo metodo (magari un approccio (mathscr{T}_{2k})?) e applicarlo ad altri tipi di immagini e sistemi biometrici, forse integrandolo anche con approcci basati su reti neurali, per vedere se questa “prospettiva neutrosofica” può portare ulteriori benefici.
Per ora, siamo molto soddisfatti di aver dimostrato che la segmentazione multi-classe tramite set neutrosofici non solo è fattibile, ma è anche tremendamente efficace, specialmente quando le cose si fanno… “rumorose”! È un piccolo passo, ma crediamo sia nella direzione giusta per rendere le macchine capaci di “vedere” il mondo in modo più simile a come facciamo noi, incertezze comprese.
Fonte: Springer





