
RWD-DOF: La Rivoluzione della Ruota Robotica che si Trasforma e Sfida Ogni Gradino!
Ciao a tutti! Oggi voglio parlarvi di qualcosa che mi sta davvero a cuore, un progetto che potrebbe cambiare il modo in cui i nostri amici robotici si muovono nel mondo. Avete presente i robot mobili? Fantastici, vero? Ma quando si trovano davanti a una rampa di scale o un gradino un po’ troppo alto, spesso entrano in crisi. Ecco, noi abbiamo pensato: e se la ruota stessa potesse… trasformarsi?
Una Ruota, Due Gradi di Libertà: Nasce RWD-DOF!
Vi presento la RWD-DOF (Reconfigurable Wheel Design with Dual-Degree-of-Freedom), un nome un po’ tecnico, lo so, ma che nasconde un’idea tanto semplice quanto geniale. Immaginate una ruota che non è solo un cerchio fisso, ma una struttura modulare e riconfigurabile con, udite udite, un meccanismo attivo a doppio grado di libertà. “Che paroloni!” direte voi. In pratica, significa che questa ruota può cambiare forma in due modi diversi e indipendenti per adattarsi dinamicamente a gradini di varie dimensioni.
La sua struttura è composta da tre segmenti curvi, il cui movimento sincronizzato è una piccola magia ingegneristica, resa possibile da leveraggi a cinque barre e due sistemi di ingranaggi planetari. Analizzando la cinematica (cioè come si muove) e i suoi limiti, abbiamo definito esattamente quali altezze e profondità di gradino può superare. E non è finita qui: abbiamo anche capito come i motori che la guidano (con i loro angoli di output (q_1) e (q_2)) influenzano questa trasformazione.
Perché una Ruota Trasformabile? I Limiti dei Robot Attuali
Con il rapido sviluppo della tecnologia robotica mobile, le sue applicazioni si stanno espandendo a macchia d’olio, specialmente in scenari complessi e pericolosi: operazioni antiterrorismo urbano, soccorso, rilevamento di radiazioni nucleari, ricerca e salvataggio in incendi… Insomma, tutti quei posti dove mandare un essere umano sarebbe un rischio enorme. Ma questi ambienti non sono solo pericolosi, sono anche incredibilmente complessi e richiedono ai robot di rispondere rapidamente e adattarsi a cambiamenti dinamici. Una bella sfida, no?
Attualmente, i robot mobili si dividono principalmente in tre categorie:
- Cingolati: Ottimi per superare ostacoli, ma consumano un sacco di energia e non sono velocissimi.
- Con zampe (legged): Agilissimi sui gradini, ma la loro complessità di controllo li rende meno efficienti dei robot su ruote su superfici piane.
- Su ruote: I re della velocità e dell’efficienza su superfici piane e strutturate, con basso consumo energetico e facilità di controllo. Però, metteteli davanti a un gradino o una scala, e il loro raggio fisso diventa un grosso limite.
Ecco, il nostro obiettivo era combinare il meglio dei due mondi: l’efficienza delle ruote sul piano e la capacità di superare ostacoli tipica di altre soluzioni, ma senza i loro svantaggi. La RWD-DOF nasce proprio da questa esigenza: mantenere le caratteristiche di movimento efficiente dei robot su ruote tradizionali su terreno pianeggiante e, quando necessario, trasformarsi per affrontare gradini e scale con un movimento ibrido ruota-gamba.
I Superpoteri della RWD-DOF: Cosa la Rende Speciale
I contributi principali di questa nostra creatura sono diversi, e ne vado particolarmente fiero:
- Abbiamo sviluppato una nuova ruota modulare riconfigurabile attiva a doppio grado di libertà. Il movimento sincronizzato dei suoi tre segmenti di cerchio è garantito da un meccanismo parallelo a cinque barre combinato con un sistema di ingranaggi planetari. Sembra complicato, ma funziona a meraviglia!
- Il raggio (r) e l’angolo di deflessione del cerchio ((theta)) sono regolabili. Questo permette alla ruota di deformarsi attivamente e adattarsi a diverse dimensioni di ostacoli, offrendo prestazioni ottimali sia su superfici piane che su gradini. Efficienza energetica e velocità sul piano, attraversamento fluido e adattivo sugli ostacoli. Un sogno!
- La sua struttura modulare permette una facile integrazione nelle piattaforme robotiche su ruote esistenti. Questo significa scalabilità, ridotta complessità di manutenzione e maggiore adattabilità per un’ampia gamma di sistemi robotici.
- Abbiamo analizzato a fondo il modello cinematico e i vincoli di movimento della ruota, incluse le sue proprietà cinematiche dirette e inverse. Questo ci ha permesso di definire i vincoli di riconfigurazione e derivare l’intervallo di variazione delle variabili di input, determinando le dimensioni dei gradini che la ruota può superare. Abbiamo anche stabilito la relazione tra le dimensioni dell’ostacolo e le corrispondenti variabili di input, garantendo un adattamento preciso.
- Simulazioni (con il software ADAMS) ed esperimenti su prototipi fisici hanno validato le prestazioni della ruota. Le simulazioni hanno dimostrato la sua capacità di adattarsi dinamicamente a varie dimensioni di gradini, superando scale e gradini doppi senza che il veicolo dovesse cambiare direzione. I test sul prototipo fisico hanno ulteriormente confermato l’integrità strutturale e le prestazioni superiori nel mondo reale.
Insomma, i risultati sono davvero promettenti per applicazioni in ambienti difficili!

Un Po’ di Storia: L’Evoluzione delle Ruote Riconfigurabili
Gradini e scale sono ostacoli comuni, e sviluppare robot capaci di superarli ha un grande valore accademico e un potenziale pratico enorme. Ma siccome i gradini sono solo una piccola parte del terreno piano, il robot ideale deve attraversarli efficientemente mantenendo alte prestazioni sul liscio. Per questo, i ricercatori hanno proposto varie strategie.
I primi studi hanno introdotto robot con strutture di ruote sagomate, dove i cerchi erano divisi in più sezioni. Pensate a ASGUARD, robot anfibi miniaturizzati, RHex, Levo e FleTbot. Questi robot miglioravano la fluidità nel superare i gradini e riducevano la dipendenza da fattori esterni come l’attrito, ma spesso “saltellavano” parecchio sul piano, compromettendo efficienza e stabilità.
Per risolvere questi problemi, sono nate le ruote riconfigurabili. A differenza di quelle sagomate, queste possono muoversi fluidamente sul piano in forma circolare, per poi trasformarsi in una configurazione “ruota-gamba” quando incontrano ostacoli. Qui la ricerca si divide in due filoni:
- Ruote riconfigurabili passive: Si affidano all’attrito con il terreno o i gradini, combinato con un meccanismo di innesco, per cambiare forma. Esempi notevoli sono Land Devil Ray, WheeLeR, (alpha)-WaLTR. Funzionano bene sul piano e possono superare gradini, ma la dipendenza dall’attrito esterno le rende poco stabili e con tassi di successo incostanti.
- Ruote riconfigurabili attive: Hanno motori per controllare la riconfigurazione, riducendo la dipendenza dall’ambiente. Quattroped, per esempio, trasformava una ruota circolare in semicircolare. TurboQuad ha migliorato l’efficienza eliminando la necessità di fermarsi, ma dipendeva ancora dall’attrito. Altri design come SWhegPro e R-Taichi avevano limitazioni simili. Alcune strutture ruota-gamba come OmniWheg e Trimode si agganciavano al gradino, causando bruschi cambiamenti nella traiettoria del centro di massa. Una soluzione interessante utilizzava la superficie del cerchio per contattare il gradino, affidandosi alla coppia del motore e al supporto del gradino per un superamento più fluido. Tuttavia, la maggior parte di queste ruote attive aveva un solo grado di libertà, limitando l’adattabilità a diverse dimensioni di gradini.
L’Università di Hanyang in Corea del Sud ha sviluppato il robot STEP, introducendo due gradi di libertà per un adattamento migliore, ma la sua struttura era ingombrante e poco modulare. Ispirati da questi lavori, abbiamo proposto la nostra RWD-DOF, cercando di unire flessibilità, movimento efficiente, compattezza e modularità.
Dentro la Magia: Come Funziona la RWD-DOF
Avere due gradi di libertà è fantastico, ma come li implementiamo? L’obiettivo è combinare l’efficienza delle ruote tradizionali con i vantaggi delle “ruote-gamba” per salire le scale. Per farlo, la ruota circolare fa da base, e la funzionalità ruota-gamba si ottiene dividendo il cerchio in tre parti uguali. I fattori chiave sono la distanza di ogni sezione del cerchio dal centro di massa della ruota (il raggio, r) e l’angolo di rotazione di ogni sezione attorno alla sua biella di collegamento (l’angolo di deflessione, (theta)). Questi sono i nostri due gradi di libertà!
La nostra ruota può assumere quattro configurazioni principali:
- Cerchio perfetto: Ideale per superfici piane e lisce.
- Raggio aumentato: Per superare ostacoli bassi, allargando temporaneamente il raggio della ruota.
- Configurazione per scendere le scale: Regolando sia raggio che angolo di deflessione, con rotazione del cerchio in senso antiorario.
- Configurazione per salire le scale: Simile alla precedente, ma con rotazione del cerchio in senso orario.
Questi aggiustamenti, basati sulla dimensione dell’ostacolo, migliorano la stabilità e assicurano un controllo preciso della traiettoria. L’assetto di salita è cruciale. Molte ruote precedenti si agganciavano o sfruttavano molto l’attrito. La nostra RWD-DOF adotta un assetto più efficiente che riduce l’attrito necessario e garantisce una traiettoria più fluida.
Ma come si realizza tutto ciò meccanicamente? Le sfide erano due: ottenere il movimento a doppio grado di libertà nello spazio ristretto della ruota e garantire il movimento sincronizzato dei tre segmenti. La soluzione? Una struttura composita che integra un sistema di ingranaggi planetari con un meccanismo parallelo a cinque barre (del tipo PRRRP, cioè con due giunti prismatici e tre rotoidali). Il meccanismo a cinque barre è il cuore che muove ogni singolo segmento del cerchio. Il treno di ingranaggi planetari (un ingranaggio solare e tre planetari) fornisce potenza a questo meccanismo. L’ingranaggio solare è collegato al motore, mentre i planetari sono fissati al supporto del motore. Per formare una ruota riconfigurabile, servono tre set di meccanismi a cinque barre, uno per ogni cerchio. Due set di treni di ingranaggi planetari e tre set di meccanismi a cinque barre lavorano insieme, con gli ingranaggi planetari che ingranano con cremagliere attaccate alle bielle, convertendo il moto circolare in lineare. Questa sincronizzazione garantisce che ogni cerchio si muova in modo coordinato.
Dalla Teoria alla Pratica: Simulazioni e Prototipi
Per valutare la capacità di superamento degli ostacoli della nostra RWD-DOF, abbiamo prima creato un modello 3D del robot in SolidWorks e poi lo abbiamo importato in ADAMS per analisi di simulazione dinamica. Abbiamo simulato il movimento della ruota mentre attraversava scale di varie dimensioni e orientamenti, concentrandoci sulla sua traiettoria e postura. I risultati hanno confermato l’adattabilità della ruota, specialmente la fluidità della traiettoria.
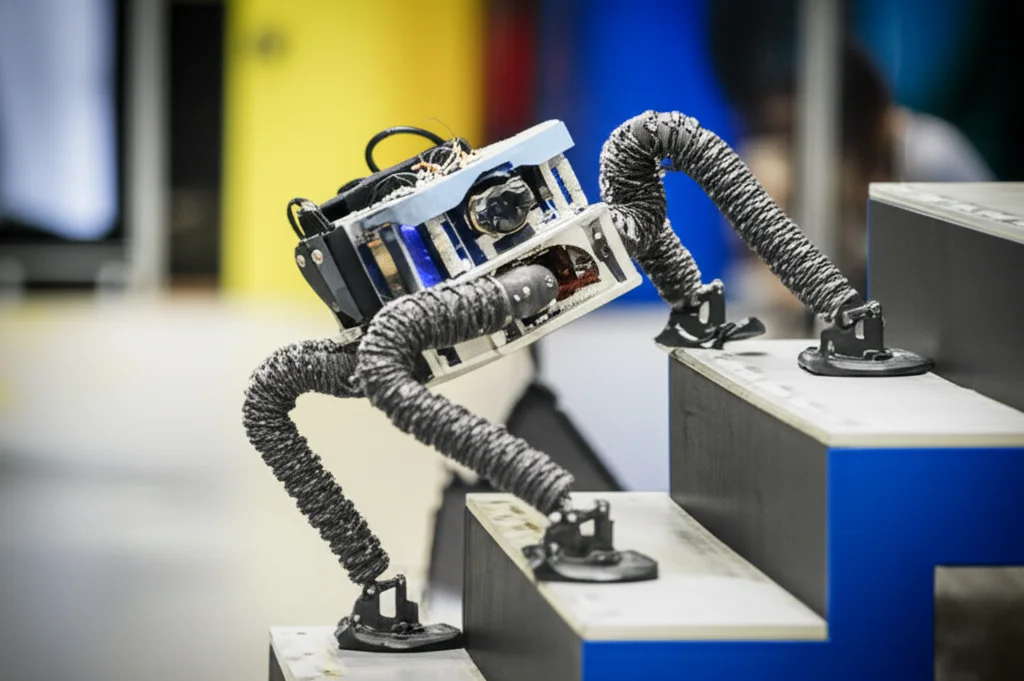
Poi è arrivato il momento del prototipo fisico! Lo abbiamo costruito per validare il design strutturale. Immaginate la scena: la ruota inizia e finisce la sua corsa in forma circolare, mantenendo l’efficienza sul piano. Quando incontra un gradino, si deforma preparandosi alla salita. La biella verde vicino al gradino si estende più di quella gialla sul lato opposto. Questo design permette un’elevazione fluida del centro di massa della ruota mentre il cerchio si appoggia delicatamente sul gradino, minimizzando i cambiamenti bruschi tipici delle ruote passive.
Abbiamo testato gradini di diverse altezze (da 100mm a 160mm con profondità di 283mm) e profondità. Le traiettorie del centro di massa sono rimaste incredibilmente fluide, allineandosi con l’inclinazione della scala, senza picchi o fluttuazioni significative. Un aspetto unico è la capacità di salire e scendere le scale senza che il veicolo cambi direzione, affrontando efficacemente anche gradini bilaterali. Questa capacità è particolarmente significativa per i robot che operano in spazi ristretti, risparmiando tempo e migliorando l’efficienza.
Abbiamo anche confrontato la nostra RWD-DOF con un modello del robot WheeLeR. I risultati? La traiettoria della nostra ruota è decisamente più fluida, indicando una maggiore scorrevolezza nel superamento degli ostacoli.
Il prototipo fisico, equipaggiato con motori Unitree A1 per la riconfigurazione e motori MAXON per la rotazione delle ruote, controllato da una scheda Orange PI, ha confermato i principi di movimento. Abbiamo testato varie riconfigurazioni: mantenimento della forma circolare, aumento del solo raggio, rotazione del cerchio in senso orario o antiorario aumentando il raggio. I risultati hanno dimostrato la capacità della ruota di regolare accuratamente la sua morfologia, confermando la razionalità del design e l’affidabilità del sistema di controllo.
Infine, abbiamo portato il prototipo su una vera scalinata di un edificio sperimentale (gradini da 300mm di profondità x 160mm di altezza). Ebbene, li ha superati brillantemente!
Conclusioni e Sguardi al Futuro
Per affrontare i limiti dei robot mobili tradizionali nel superare efficientemente ostacoli come le scale, abbiamo introdotto questa ruota modulare attiva a doppio grado di libertà. L’analisi cinematica dettagliata ci ha permesso di creare un modello per regolare automaticamente l’assetto in base alle dimensioni dei gradini. Le simulazioni e gli esperimenti con il prototipo hanno confermato che la RWD-DOF può navigare fluidamente scale con gradini di varie dimensioni e persino affrontare gradini di diverse dimensioni all’interno della stessa scala.
Certo, ci sono ancora sfide. Fattori come l’attrito e la trazione sono cruciali. Un attrito insufficiente può compromettere la stabilità. Inoltre, ci siamo concentrati sulla struttura innovativa della ruota, ma gli algoritmi di controllo del robot stesso non sono stati esplorati a fondo. Il lavoro futuro si concentrerà sulla creazione di ambienti sperimentali più rappresentativi per validare ulteriormente le prestazioni del prototipo e affrontare le sfide del controllo dell’equilibrio dei robot a due ruote che utilizzano queste ruote riconfigurabili. L’obiettivo è facilitare il passaggio dagli esperimenti di validazione alle applicazioni pratiche.
Insomma, la RWD-DOF non è solo una ruota, è una promessa: quella di robot più agili, più intelligenti e capaci di muoversi in un mondo che, ammettiamolo, non è sempre piatto e prevedibile. E io non vedo l’ora di vedere dove ci porterà questa tecnologia!
Fonte: Springer





