LISA, il Robot Lucertola che Balla con un Solo Muscolo: Vi Racconto la Mia Avventura!
Amici appassionati di tecnologia e natura, oggi voglio portarvi nel cuore di una sfida che mi ha tenuto col fiato sospeso: come possiamo creare robot agili, capaci di muoversi in modi complessi, ma con una semplicità disarmante? Immaginate un robot che si muove con un solo motore, un singolo grado di libertà (1-DOF, come lo chiamiamo in gergo). Sembra una limitazione enorme, vero? Eppure, la natura ci offre spunti incredibili, e uno di questi è la lucertola.
Da tempo, nel mondo della robotica, si studiano meccanismi mobili che possano funzionare con pochi attuatori. L’obiettivo? Creare dispositivi compatti, leggeri e innovativi. Pensate ai meccanismi di Jansen, quelle creature cinetiche che camminano con un solo movimento periodico, o a robot esapodi come 1STAR. Molti di questi, però, hanno dei piccoli “nei”: a volte le “zampe” devono slittare per avanzare, oppure serve un motore extra per girare, o ancora l’analisi del movimento diventa un rompicapo matematico che dipende da fattori imprevedibili come l’attrito col terreno.
L’Ispirazione Rettiliana: Nasce LISA
Guardando le lucertole, ci siamo accorti di una cosa geniale: quando corrono veloci, l’efficienza del loro movimento deriva principalmente dalla torsione del tronco, non tanto dalle zampe. Questa osservazione è stata la scintilla! E se potessimo ridurre il numero di motori in un robot con più zampe, magari arrivando a usarne uno solo? Da qui è nata l’idea del nostro robot, che abbiamo battezzato affettuosamente LISA (Lizard-Inspired Single-Actuated robot).
LISA non è un robot lucertola qualsiasi. La sua vera magia sta in una nuova morfologia multi-zampa che supera i problemi dei suoi predecessori. Con un solo attuatore, LISA può non solo avanzare, ma anche curvare! Il segreto? Un meccanismo a quadrilatero articolato che imita l’andatura quadrupede delle lucertole, permettendo una camminata senza slittamenti e una cinematica (cioè la matematica del movimento) molto più gestibile rispetto all’analisi dinamica complessa.
Nei nostri studi precedenti, avevamo già dimostrato che questa morfologia funzionava, controllando la lunghezza del passo e l’angolo di sterzata di LISA. Ma c’era un “ma”: il prototipo non riusciva a sfruttare tutto il suo potenziale, limitato a un angolo di input di circa ±70 gradi, quando in teoria avrebbe potuto raggiungere i ±90 gradi. Raggiungere questo massimo teorico significherebbe sbloccare tutte le capacità di LISA. Ed è proprio questa la missione che ci siamo dati con il nuovo prototipo!
La Sfida: Raggiungere l’Angolo Massimo
Sviluppare un nuovo prototipo di LISA capace di arrivare a quell’agognato angolo di ±90 gradi non è stato uno scherzo. Ci siamo trovati di fronte a tre sfide principali:
- Geometria Anti-Collisione: Immaginate il robot nella sua postura più estrema, con l’angolo di input al massimo. Tutti i suoi “arti” (i link del meccanismo) si allineano. Se non fossero disegnati a puntino, si scontrerebbero! Abbiamo dovuto progettare una geometria dei link “piegata” ad arte per evitarlo.
- Meccanismo di “Push-Back”: Quando i link sono tutti allineati, il robot è in una sorta di “punto morto”. Per farlo tornare a una postura da cui può muoversi agilmente, abbiamo introdotto un meccanismo a molla a lamina che lo “spinge” delicatamente a recuperare la posizione.
- Equilibrio Precario: Nella postura ad angolo massimo, tutti i punti di appoggio del robot sono su una linea retta. Tradotto: rischia di ribaltarsi! Serviva un sistema di bilanciamento.
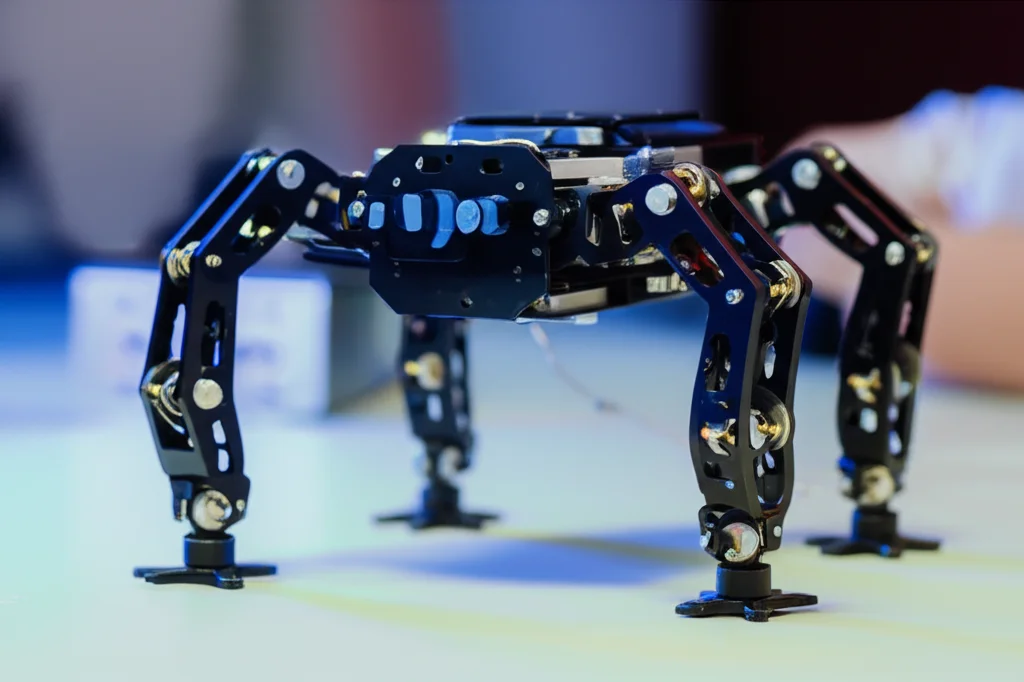
Il nuovo LISA è un concentrato di ingegneria. Ha una sezione con un meccanismo a quadrilatero articolato con link che si incrociano (una caratteristica unica!) e delle “zampe” a forma di artiglio. Poi c’è una sezione con uno slider lineare che ospita l’attuatore (un servomotore smart XM430-W210-T della ROBOTIS), la batteria e la scheda di controllo. Questo slider, collegato al centro dei link anteriore e posteriore del quadrilatero, è cruciale perché semplifica enormemente l’analisi del movimento, mantenendo la cinematica simmetrica indipendentemente da quali zampe siano in appoggio.

Per il bilanciamento, abbiamo testato tre configurazioni:
- SupportUseMode: Un meccanismo a bastoncino attaccato allo slider, con dei piccoli rulli a sfera a contatto col terreno.
- PlateUseMode: Dei meccanismi a piastra attaccati ai link anteriore e posteriore, che cambiano la base d’appoggio a seconda della postura.
- DualUseMode: L’unione fa la forza! Entrambi i sistemi precedenti usati insieme.
Ve lo anticipo: il DualUseMode si è rivelato il campione di stabilità!
La Matematica del Movimento: Capire LISA
Per valutare il nostro nuovo gioiellino, dovevamo prima “scrivere” il suo movimento in linguaggio matematico. Abbiamo definito un sistema di coordinate specifico per LISA, che chiamiamo “coordinate del robot”. Grazie a questo, abbiamo potuto formulare equazioni per:
- L’angolo di sterzata
- La lunghezza del passo
- La postura del robot
- La direzione di marcia
- La curvatura della traiettoria
Questa formulazione cinematica ci ha confermato, nero su bianco, che LISA può davvero muoversi in avanti e curvare con un solo grado di libertà, e che i parametri chiave del suo movimento dipendono dall’angolo di input tra due passi consecutivi.
Sul Campo: I Test di LISA
Dopo tanta teoria e progettazione, è arrivato il momento della verità: i test sperimentali! Li abbiamo divisi in due fasi.
Fase 1: Valutazione dei Meccanismi e dell’Oscillazione
Qui volevamo verificare tre cose:
- Quale meccanismo di bilanciamento fosse il più stabile.
- Se il robot riuscisse davvero a raggiungere l’angolo di input massimo.
- L’efficacia del meccanismo di “push-back”.
Abbiamo fatto camminare LISA generando pattern di movimento che includessero spesso le posture estreme (quelle a ±90 gradi) e curve strette. Abbiamo usato un sistema di motion capture e sensori angolari per misurare ogni suo fremito. I risultati? Il DualUseMode per il bilanciamento ha vinto a mani basse, garantendo una camminata stabile con oscillazioni minime (parliamo di un valore RMS di appena 14.1 milliradianti su 500 passi!). Abbiamo anche confermato che LISA raggiungeva l’angolo di input massimo senza problemi e che il meccanismo di push-back faceva il suo dovere, permettendo al robot di mantenere la sua morfologia a quadrilatero incrociato.
Fase 2: Valutazione delle Prestazioni Cinematiche
In questa fase, l’obiettivo era confrontare il movimento reale di LISA con i valori teorici calcolati dalla nostra cinematica. Abbiamo generato angoli di input casuali e fatto camminare LISA, misurando tutto con motion capture e sensori. Abbiamo confrontato i valori “ideali” (calcolati) con quelli “misurati” per angolo di sterzata, lunghezza del passo e curvatura.
I risultati sono stati molto incoraggianti! Abbiamo osservato un errore di circa il 4.7% per l’angolo di sterzata e del 6.4% per la lunghezza del passo. Da dove vengono questi errori? Principalmente dalla superficie su cui abbiamo testato LISA: un tappeto. Le fibre del tappeto, sotto la spinta delle “zampe” ad artiglio di LISA, tendevano a flettersi leggermente, causando un piccolo arretramento delle zampe di supporto. Questo, ovviamente, influenzava un po’ il movimento rispetto al modello ideale su una superficie perfettamente rigida.

Tuttavia, la cosa più importante è che la riproducibilità delle prestazioni è risultata alta, con deviazioni standard piccole. Questo significa che, nonostante le piccole discrepanze dovute al tappeto, il movimento di LISA è consistente e prevedibile. E questo è un risultato notevole per un robot 1-DOF!
Conclusioni e Prossimi Passi Sinuosi
Ce l’abbiamo fatta! Il nuovo prototipo di LISA ha dimostrato di poter raggiungere l’angolo di input massimo teorico e di camminare in modo stabile. Gli errori osservati sono legati più all’ambiente di test che alla morfologia del robot in sé, e potrebbero essere mitigati con un nuovo design delle “zampe”, magari specifico per l’applicazione futura che abbiamo in mente.
Quale applicazione? Beh, una delle più promettenti per LISA è la mobilità su superfici verticali, come l’ispezione di facciate di edifici. Stiamo già pensando a meccanismi per le zampe che possano “aggrapparsi” ai muri!
Un altro filone di ricerca futuro sarà analizzare l’efficienza energetica di LISA. Ci aspettiamo grandi cose, dato che i robot con pochi gradi di libertà dovrebbero, in teoria, consumare meno.
In definitiva, questa avventura con LISA ci ha confermato che la sua morfologia è efficace e che il nuovo prototipo si comporta egregiamente come un robot 1-DOF capace sia di propulsione che di rotazione. È un piccolo passo per un robot, ma un grande balzo per la robotica ispirata alla natura!
Fonte: Springer





