Atterraggio Lunare Perfetto? La Matematica Svela i Segreti delle Piattaforme Auto-Livellanti
Ciao a tutti! Siete pronti per un viaggio affascinante nel futuro dell’esplorazione spaziale? Oggi voglio parlarvi di una sfida ingegneristica pazzesca: come far atterrare i nostri lander su corpi celesti, come la Luna, in modo che siano perfettamente dritti e pronti all’azione, anche su terreni accidentati. Immaginate la scena: un lander che atterra, magari su un pendio o su un suolo irregolare. Senza un aiutino, si ritroverebbe inclinato, rendendo complicate operazioni cruciali come scaricare strumenti o far partire un modulo di risalita.
Programmi ambiziosi come Artemis della NASA e Terra Novae dell’ESA ci spingono a sviluppare lander sempre più affidabili e versatili. Puntiamo a siti di atterraggio sempre più complessi, magari vicino ai poli lunari, dove le condizioni del terreno sono tutt’altro che ideali. Ecco perché l’idea di una piattaforma di atterraggio capace non solo di assorbire l’urto dell’atterraggio, ma anche di allinearsi, livellarsi e persino abbassarsi una volta a terra, sta prendendo sempre più piede.
La Sfida dell’Atterraggio “Storto”
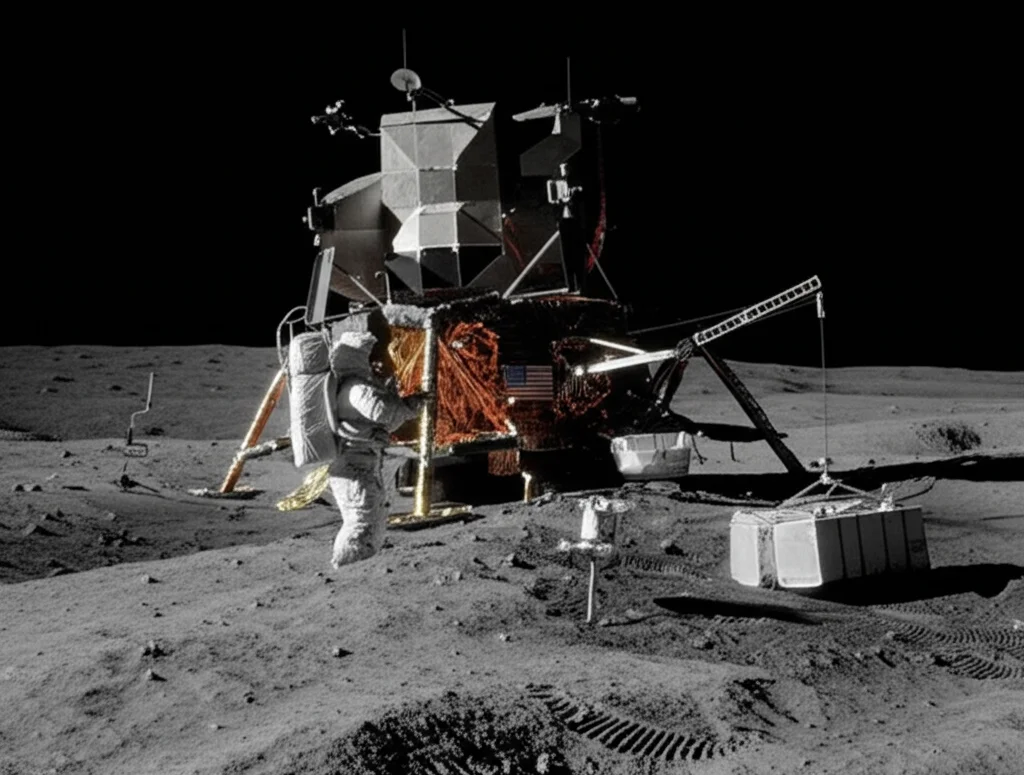
I lander attuali usano gambe ammortizzate per gestire l’impatto iniziale. Ma una volta fermi, se il terreno è inclinato o se gli ammortizzatori si sono compressi in modo diverso, la piattaforma rimane inclinata. Questo non è un problema nuovo. Pensate alle missioni Apollo: gli astronauti dovevano usare piccole gru per scaricare l’attrezzatura dal Modulo Lunare (LM). E nella missione Apollo 15, l’LM finì parzialmente dentro un piccolo cratere, inclinandosi di ben 11 gradi! Sebbene il limite di inclinazione per un decollo sicuro non sia chiarissimo (si parla di circa 15 gradi, ma senza certezze assolute), è ovvio che una piattaforma livellata aumenterebbe di molto la sicurezza e le possibilità operative.
Un sistema che possa correggere l’inclinazione e abbassare la piattaforma renderebbe tutto molto più semplice:
- Accesso facilitato al carico utile (payload bay).
- Possibilità di montare strumenti sensibili all’inclinazione.
- Maggiore sicurezza per le fasi di risalita.
- Apertura a siti di atterraggio prima considerati troppo difficili.
Insomma, una vera rivoluzione per le capacità dei nostri lander! Ma come progettarlo senza impazzire con calcoli iper-complessi?
La Nostra Idea: Semplificare la Complessità
Progettare un meccanismo del genere non è banale. Una piattaforma di atterraggio con gambe mobili assomiglia a un manipolatore parallelo, come un hexapod (o piattaforma di Gough-Stewart). Il posizionamento di queste piattaforme di solito richiede la cinematica inversa: dati la posizione e l’orientamento desiderati della piattaforma, calcolare come devono muoversi gli attuatori (le gambe). Questo spesso porta a equazioni complesse, a volte risolvibili solo numericamente con polinomi di alto grado. Un processo lungo e tedioso, specialmente se si vogliono confrontare diverse idee progettuali. Senza contare problemi come singolarità, comportamenti non lineari e movimenti secondari indesiderati (il cosiddetto “moto parassita”).
Certo, per un progetto finale tutti questi dettagli vanno considerati. Ma nelle fasi iniziali, serve un modo per avere risultati utili rapidamente, per capire se un’idea è promettente o meno. E non basta la geometria: bisogna considerare anche le forze in gioco. Fare un’analisi agli elementi finiti (FEA) completa richiede dettagli (dimensioni esatte, materiali, distribuzione delle masse) che all’inizio semplicemente non ci sono, oltre a richiedere tempo per creare modelli, mesh, ecc. D’altra parte, approcci troppo semplici (come considerare il lander staticamente determinato) falliscono se ci sono quattro o più gambe (sistema iperstatico).
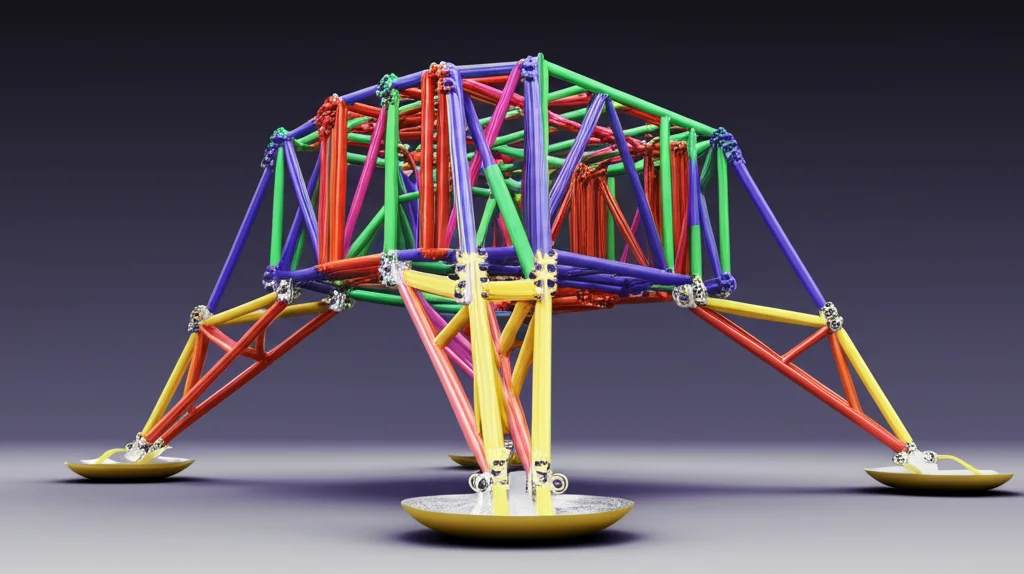
Ecco allora la nostra proposta: un approccio basato sull’analisi matematica che usa un numero minimo di parametri noti e richiede poca potenza di calcolo. L’idea chiave è modellare il sistema di atterraggio come una struttura reticolare (un truss) e calcolare le forze nelle aste e sui nodi usando il Metodo della Rigidezza Diretta (DSM). Il DSM è alla base di molti software FEA, ma usandolo direttamente, evitiamo la necessità di interfacciarsi con programmi complessi. È basato su matrici, facilmente gestibili da un computer, è parametrico e quindi automatizzabile. Perfetto per fare studi “what-if” e confrontare rapidamente diverse varianti di design!
Come Funziona la Magia Matematica?
Il nostro approccio numerico combina calcolo vettoriale, trigonometria e ottimizzazione numerica non lineare. Ecco i passi principali:
1. Definizione Geometrica Semplificata: Definiamo il lander con pochi parametri chiave: dimensioni del corpo, lunghezza delle aste delle gambe (primarie e secondarie), posizione del centro di gravità (CoG), posizione degli attacchi (interfacce, I/F) delle gambe al corpo. Usiamo due sistemi di coordinate: uno solidale al corpo del lander (body) e uno globale (global).
2. Calcolo del Piano del Terreno: Non assumiamo di conoscere il terreno a priori. Lo calcoliamo basandoci sulla posizione dei piedi del lander dopo l’atterraggio (che conosciamo misurando l’assetto del lander e la lunghezza delle gambe post-compressione).
3. Simulazione del Movimento: Partendo dall’orientamento iniziale post-atterraggio, simuliamo piccoli passi di rotazione (per livellare) e traslazione verticale (per abbassare) verso la configurazione finale desiderata (livellata e ad una certa altezza dal suolo).
4. Adattamento della Geometria: Ad ogni passo, i piedi del lander si “solleverebbero” matematicamente dal piano del terreno calcolato. Per farli tornare a contatto, modifichiamo la geometria. Nel nostro studio, ipotizziamo di muovere linearmente l’interfaccia superiore dell’asta primaria (I/F1) di ogni gamba lungo l’asse verticale del lander (zbody). Calcoliamo di quanto ogni I/F1 deve spostarsi.
5. Calcolo delle Forze (DSM): Per ogni stato discreto del movimento, modelliamo il lander come una struttura reticolare. Le gambe sono le aste reali, e aggiungiamo aste “virtuali” per rappresentare la rigidezza del corpo del lander che collega le gambe. Applichiamo la forza di gravità (lunare) al CoG e consideriamo i piedi come appoggi fissi (ipotesi quasi-statica). Usando il DSM, calcoliamo le forze interne in ogni asta (gamba) e le reazioni ai punti di interfaccia.
Abbiamo validato questo approccio confrontando i risultati delle forze ottenuti con il nostro codice MATLAB con quelli di un software FEA standard (MSC Nastran). Le differenze sono risultate inferiori all’1%, confermando l’affidabilità del metodo per questa fase di pre-progettazione.
Un Esempio Pratico: Il Lander Argonaut dell’ESA
Per mettere alla prova il nostro strumento, abbiamo preso come riferimento il concept del lander lunare Argonaut dell’ESA, previsto per i primi anni 2030. Usando le dimensioni disponibili da un modello CAD preliminare e ipotizzando una massa di 3.7 tonnellate, abbiamo simulato l’operazione di livellamento e abbassamento partendo da un’inclinazione iniziale di 15° (il caso peggiore, con l’inclinazione diretta verso una gamba).
La simulazione ha calcolato il percorso di movimento per portare il lander da uno stato iniziale inclinato (Stato 0) a uno finale livellato e leggermente abbassato (Stato 100), determinando lo spostamento necessario per l’interfaccia I/F1 di ogni gamba. Per questo esempio, il movimento richiesto per I/F1 variava tra -0.43 m e +0.82 m, implicando una corsa totale dell’attuatore lineare di almeno 1.25 m per gestire pendenze fino a 15°.
I risultati delle forze sono stati interessanti:
- Il carico massimo su una singola gamba si verifica nello stato iniziale inclinato (Stato 0), non durante o dopo il livellamento. L’operazione, quindi, riduce lo stress massimo sulle gambe.
- A causa della bassa gravità lunare, la forza massima quasi-statica su una gamba non ha superato 1.3 kN (ovviamente, nel design reale vanno aggiunti fattori di sicurezza).
- Durante il livellamento, il carico si ridistribuisce gradualmente dalla gamba più caricata (quella “a valle”) alle altre.
Ma la cosa forse più utile è che la simulazione ha evidenziato potenziali problemi geometrici con il design Argonaut in configurazione livellata su pendenza di 15°:
- Possibile instabilità dovuta a gambe quasi verticali.
- L’interfaccia I/F1 di una gamba finiva troppo in alto, potenzialmente fuori dallo spazio disponibile nel corpo del lander per il meccanismo.
- Un’altra interfaccia I/F1 finiva troppo in basso, sotto la struttura reale.
- Una gamba intersecava il corpo del lander.
Queste osservazioni sono preziose! Permettono di identificare criticità e pensare a soluzioni (modificare lunghezza gambe, posizione interfacce, altezza corpo lander, limitare l’angolo di pendenza massimo gestibile) fin dalle primissime fasi del progetto.

Cosa Abbiamo Imparato e Prossimi Passi
Implementare una cinematica di allineamento, livellamento e abbassamento è complesso, ma i benefici potenziali sono enormi. Il nostro approccio matematico offre un modo rapido ed efficiente per ottenere una prima valutazione della fattibilità di un design e delle sue prestazioni. Permette di:
- Stimare la corsa richiesta dagli attuatori.
- Calcolare le forze agenti sulle interfacce delle gambe.
- Identificare potenziali limiti geometrici o problemi di stabilità.
- Confrontare rapidamente diverse configurazioni di lander (numero di gambe, tipo cantilever o inverted tripod, dimensioni).
Certo, il modello attuale ha delle semplificazioni (terreno piano localmente, effetti dinamici trascurati, CoG fisso, niente attrito o moti parassiti). In futuro, contiamo di espanderlo per includere condizioni del suolo più realistiche, effetti dinamici, lo spostamento del CoG dovuto al consumo di carburante o al movimento stesso, e altro ancora.
Ma già così, questo strumento si è dimostrato potente per supportare le decisioni nelle fasi iniziali di progettazione, aiutando a creare lander più capaci e versatili per le future, emozionanti avventure sull’esplorazione della Luna e oltre! È la matematica che ci aiuta a fare passi da gigante, letteralmente, anche su altri mondi.
Fonte: Springer





