
Pesci Robot e Confini Misteriosi: Come le Pareti Cambiano la Danza Acquatica ad Alto Numero di Reynolds
Ciao a tutti! Oggi voglio portarvi con me in un viaggio affascinante nel mondo dei nuotatori artificiali, ma non quelli microscopici a cui forse siete abituati. Parliamo di bestioline robotiche, pesciolini di qualche centimetro che sfrecciano nell’acqua a velocità tali da raggiungere numeri di Reynolds (quel parametro che ci dice quanto turbolento è il flusso) dell’ordine di 1000 o addirittura 10.000! È un regime molto diverso da quello delle tranquille nuotate batteriche, più vicino a quello dei pesci veri.
Da sempre mi affascina osservare il comportamento collettivo negli animali: stormi di uccelli, banchi di pesci, greggi… come fanno a coordinarsi così bene? Per capirci qualcosa di più dal punto di vista fisico, noi scienziati usiamo spesso dei “sistemi modello”, come questi pesci robot. L’idea è: creiamo delle entità mobili, diamo loro qualche regola semplice di interazione e vediamo cosa succede. E funziona! Si riescono a riprodurre comportamenti collettivi come il formare banchi (schooling), il muoversi in gruppo compatto (flocking) o il vorticare (swirling).
Ma c’è una domanda che mi ronzava in testa: cosa succede a questi nuotatori “veloci”, ad alto numero di Reynolds, quando incontrano dei confini? E il tipo di confine fa differenza? Sappiamo che per particelle “secche” o nuotatori a basso Reynolds, i muri sono importanti, spesso le particelle ci si accumulano vicino. Ma ad alte velocità, con tutta quella turbolenza in gioco, come cambia la storia?
I Nostri Protagonisti: I Pesci Robot
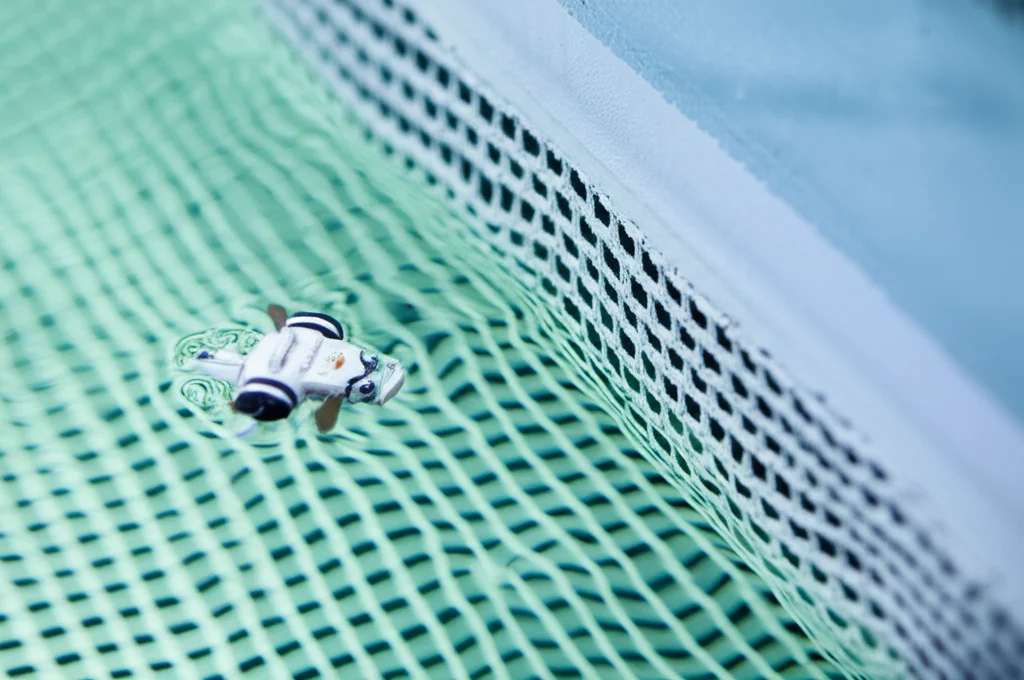
Abbiamo usato dei pesciolini giocattolo disponibili in commercio, modificati leggermente per poterli tracciare. Sono lunghi pochi centimetri e la loro pinna caudale sbatte a frequenze diverse (circa 2, 4 e 7.7 Hz), generando velocità che possono arrivare fino a 15-17 cm/s. Questo, come dicevo, ci porta a numeri di Reynolds belli alti, intorno a 10^4. Una cosa curiosa è che questi pesciolini cambiano la frequenza di battito in modo apparentemente casuale, seguendo uno schema che si ripete ogni 4 minuti circa. Questo li rende un po’ imprevedibili, il che non guasta per studiare l’auto-organizzazione!
Per i nostri esperimenti, abbiamo messo questi pesci in arene circolari riempite con uno strato d’acqua poco profondo (5 cm), giusto un po’ più alto dei pesci (3.4 cm), così da non farli strisciare sul fondo.
Il Mistero delle Pareti: Solide vs Porose
Qui viene il bello. Abbiamo usato due tipi di arene, entrambe immerse in una vasca più grande:
- Una con pareti solide e impermeabili (un cilindro di vetro).
- Una con pareti porose (una rete con fori di pochi millimetri).
Perché questa scelta? L’idea era di agire sul flusso d’acqua generato dai pesci. Quando nuotano, creano un bel po’ di “risucchio” all’indietro. Le pareti solide bloccano questo flusso (anche se poi si dissipa), mentre quelle porose permettono all’acqua (e quindi a parte del disturbo idrodinamico) di “scappare” fuori dall’arena. Inoltre, abbiamo notato che i pesci “rimbalzano” di più sulle pareti solide rispetto a quelle porose, più morbide. Entrambi questi effetti potevano avere conseguenze importanti, e volevamo vederci chiaro.
Un Pesce Solo Soletto: L’Importanza dell’Angolo
Abbiamo iniziato seguendo un singolo pesce robot. Sia nell’arena solida che in quella porosa, non c’è stata sorpresa: il pesce passava la maggior parte del tempo a nuotare vicino alla parete. È un comportamento già visto anche a bassi Reynolds. Le velocità misurate erano un po’ più basse rispetto a quando nuotava in una vasca grande senza confini vicini (circa 10-12, 7-8 e 4-5 cm/s), segno che la vicinanza del muro rallenta un po’.
Ma ecco la differenza cruciale, quella che si è rivelata la chiave di tutto: l’angolo che il pesce formava rispetto alla parete!
- Con la parete impermeabile (vetro), il pesce tendeva ad allinearsi quasi parallelamente al muro, formando un angolo molto piccolo (meno di 10°).
- Con la parete porosa, invece, il pesce si allineava con un angolo decisamente maggiore (intorno ai 22°).
Questa differenza di inclinazione, come vedremo, cambia completamente le carte in tavola quando i pesci sono tanti. Ma perché questa differenza di angolo? Crediamo sia un effetto legato all’alto numero di Reynolds e alla scia turbolenta (una specie di “strada di vortici” al contrario, chiamata scia di von Karman inversa) creata dalla pinna caudale. Vicino a una parete impermeabile, la parte della scia che si formerebbe tra la pinna e il muro viene disturbata o soppressa. Questo crea uno squilibrio di forze che tende a spingere la coda del pesce *verso* il muro, risultando in un angolo piccolo. Con la parete porosa, invece, il flusso può passare attraverso, la scia è più simmetrica e non c’è questa spinta netta, permettendo al pesce di mantenere un angolo maggiore.
Quando i Pesci Fanno Gruppo: Swirling e Cluster
Cosa succede mettendo più pesci insieme? Già con soli 3 pesci, le differenze tra le due arene diventano evidenti.
Nell’arena impermeabile, i pesci continuano a nuotare vicino al muro, spesso seguendosi in fila indiana (testa-coda), ma senza una vera organizzazione stabile. L’angolo piccolo che formano con la parete non favorisce la formazione di gruppi compatti. A causa delle diverse velocità e dei rimbalzi sul muro, la fila si rompe facilmente.
Nell’arena porosa, invece, accade qualcosa di magico! I tre pesci si auto-organizzano rapidamente. Si mettono paralleli tra loro, mantenendo quell’angolo “largo” (circa 22°) rispetto alla parete, e iniziano a girare tutti nella stessa direzione, formando un piccolo cluster lineare stabile che vortica lungo il bordo dell’arena. Questo stato, che chiamiamo “swirling”, può durare per minuti! Se si rompe, tendono a riformarlo velocemente. È una diretta conseguenza, secondo noi, di quell’angolo più grande osservato per il pesce singolo.
Per quantificare questo comportamento “vorticoso”, abbiamo calcolato il momento angolare normalizzato dell’insieme dei pesci ((tilde{L})). Se tutti i pesci girano nello stesso senso vicino al muro, (tilde{L}) è vicino a 1 (o -1). Se si muovono a caso o in direzioni opposte, è vicino a zero. Ebbene, per 3 pesci, nell’arena porosa (tilde{L}) fluttuava intorno a un valore non nullo, mentre nell’arena impermeabile cambiava spesso segno, passando per lo zero. La distribuzione di (tilde{L}) nell’arena porosa aveva un picco lontano da zero, confermando lo swirling persistente. Nell’arena impermeabile, la distribuzione era più larga e con una componente importante a zero.
Dalla Danza al Caos: L’Effetto del Numero
Aumentando il numero di pesci, abbiamo osservato due tendenze principali:
1. Rallentamento: Sia nell’arena solida che in quella porosa, la velocità media dei pesci diminuisce gradualmente all’aumentare del numero N. Questo è un classico fenomeno della “materia attiva” noto come separazione di fase indotta dalla mobilità, ed è interessante vederlo anche a questi alti numeri di Reynolds.
2. Perdita dello Swirling: Il momento angolare medio ((tilde{L})) diminuisce all’aumentare di N, indicando una perdita di coordinazione nel moto rotatorio. Ma qui la differenza tra le pareti è netta!
* Nell’arena impermeabile, il momento angolare crolla rapidamente già per N > 3. Lo stato diventa disordinato molto presto.
* Nell’arena porosa, il momento angolare diminuisce molto più gradualmente. Lo stato di swirling, con i pesci che formano cluster lineari e ruotano insieme (vedi foto sotto), persiste fino a numeri di pesci decisamente più alti (anche 18-20!). La proporzione di pesci che nuotano nella stessa direzione rimane alta per molto più tempo.
Alla fine, per numeri molto alti di pesci (ad esempio 38 nel nostro caso), in entrambe le arene lo swirling cessa del tutto e i pesci formano cluster disorganizzati e quasi statici, ammassati nell’arena. Ma la soglia per questa transizione è significativamente più alta nell’arena porosa.

Dentro il Flusso: Le Simulazioni al Computer
Per confermare le nostre osservazioni e capire meglio cosa succede a livello del flusso d’acqua, abbiamo fatto delle simulazioni numeriche dirette (DNS) delle equazioni di Navier-Stokes. Abbiamo modellato pesci con forma e movimento della pinna simili a quelli reali, immersi in uno strato d’acqua sottile con pareti sia impermeabili che porose.
Queste simulazioni sono computazionalmente molto costose (giorni di calcolo su centinaia di CPU!), ma ci danno una visione dettagliata e quantitativa del campo di velocità generato dai pesci e di come questo interagisce con gli altri pesci e con le pareti. È proprio questa interazione idrodinamica la chiave dell’auto-organizzazione!
I risultati delle simulazioni sono stati in ottimo accordo con gli esperimenti:
- I pesci simulati nuotano vicino alle pareti.
- Le distribuzioni di velocità sono simili a quelle sperimentali e mostrano un rallentamento all’aumentare del numero di pesci.
- Soprattutto, le simulazioni riproducono la differenza cruciale nell’angolo di allineamento con la parete: angolo piccolo per pareti impermeabili, angolo più grande per pareti porose!
Le simulazioni hanno anche visualizzato la differenza nella scia (la reverse von Karman street) vicino ai due tipi di parete, confermando la nostra ipotesi sul meccanismo che determina l’angolo di allineamento. Vedere come la parete impermeabile “tagli via” una parte della scia vicino al muro è stato illuminante!
Robot che Spostano il Mondo (o Quasi): Le Arene Mobili e Flessibili
Infine, ci siamo chiesti: e se l’arena non fosse fissa e rigida? Abbiamo fatto esperimenti (e simulazioni) con arene libere di muoversi o fatte di materiale sottile e flessibile. I risultati sono stati spettacolari!
Un gruppo di pesci robot, auto-organizzandosi, è in grado di esercitare una spinta collettiva sulle pareti dell’arena, riuscendo a spostare l’intera arena per distanze significative in poche decine di secondi!
Con arene molto flessibili, i pesci riescono a deformarle notevolmente, spingendo dall’interno. Quando l’organizzazione dei pesci cambia, la deformazione cessa o si sposta altrove.

Questo apre scenari davvero intriganti: la possibilità di creare “superstrutture” acquatiche, magari robot flessibili composti da tanti piccoli robot nuotatori, che acquisiscono mobilità e capacità di deformarsi grazie al comportamento collettivo dei loro componenti.
Conclusioni e Prospettive
In sintesi, abbiamo visto che per nuotatori artificiali ad alto numero di Reynolds, non solo i confini sono importanti, ma la loro natura (impermeabile o porosa) gioca un ruolo cruciale e non banale. La chiave sembra essere l’angolo di allineamento con la parete, influenzato dalle interazioni idrodinamiche della scia con il confine stesso. Un angolo maggiore (pareti porose) favorisce la formazione di cluster lineari stabili e swirling persistente, mentre un angolo minore (pareti impermeabili) porta a stati più disordinati.
Questi risultati sottolineano l’importanza degli effetti idrodinamici ad alto numero di Reynolds nel determinare il comportamento collettivo e aprono la strada alla progettazione di sistemi robotici acquatici innovativi, capaci di muoversi e deformarsi sfruttando l’auto-organizzazione dei loro componenti. C’è ancora molto da capire analizzando in dettaglio la struttura del flusso e le interazioni mediate dal fluido, ma la strada è aperta ed è decisamente affascinante!
Fonte: Springer





