Tocco da Stella Marina: Vi Racconto la Pelle Artificiale Super Efficiente Ispirata alla Natura!
Ciao a tutti! Oggi voglio parlarvi di qualcosa che mi appassiona da matti: come possiamo imparare dalla natura per creare tecnologie futuristiche, quasi fantascientifiche, ma incredibilmente utili e, soprattutto, efficienti. Viviamo in un’era dove i dati sono ovunque, generati da smartphone, wearable, e mille altri dispositivi. Il problema? Raccogliere ed elaborare tutti questi dati richiede un sacco di energia e può essere lento. Pensate ai nostri sensi: il tatto, ad esempio. La nostra pelle non si limita a “sentire”, ma inizia già a processare l’informazione lì, sul posto, prima di mandarla al cervello. È un sistema pazzesco, super ottimizzato! E se potessimo replicarlo?
L’Idea Geniale: Imparare dal Tatto Biologico
Ecco, l’idea che abbiamo esplorato è proprio questa: creare sistemi di “near-sensor computing”. In pratica, invece di mandare dati grezzi a un processore lontano, facciamo una parte del lavoro direttamente *vicino* al sensore. Proprio come fa il nostro sistema nervoso sensoriale! Questo non solo velocizza le cose, ma riduce drasticamente il consumo energetico. La sfida? Creare componenti che siano sia sensibili come la nostra pelle sia capaci di “pensare” localmente, il tutto consumando pochissima energia, quasi come i sistemi biologici.
La Stella Marina come Musa Ispiratrice per il Tocco
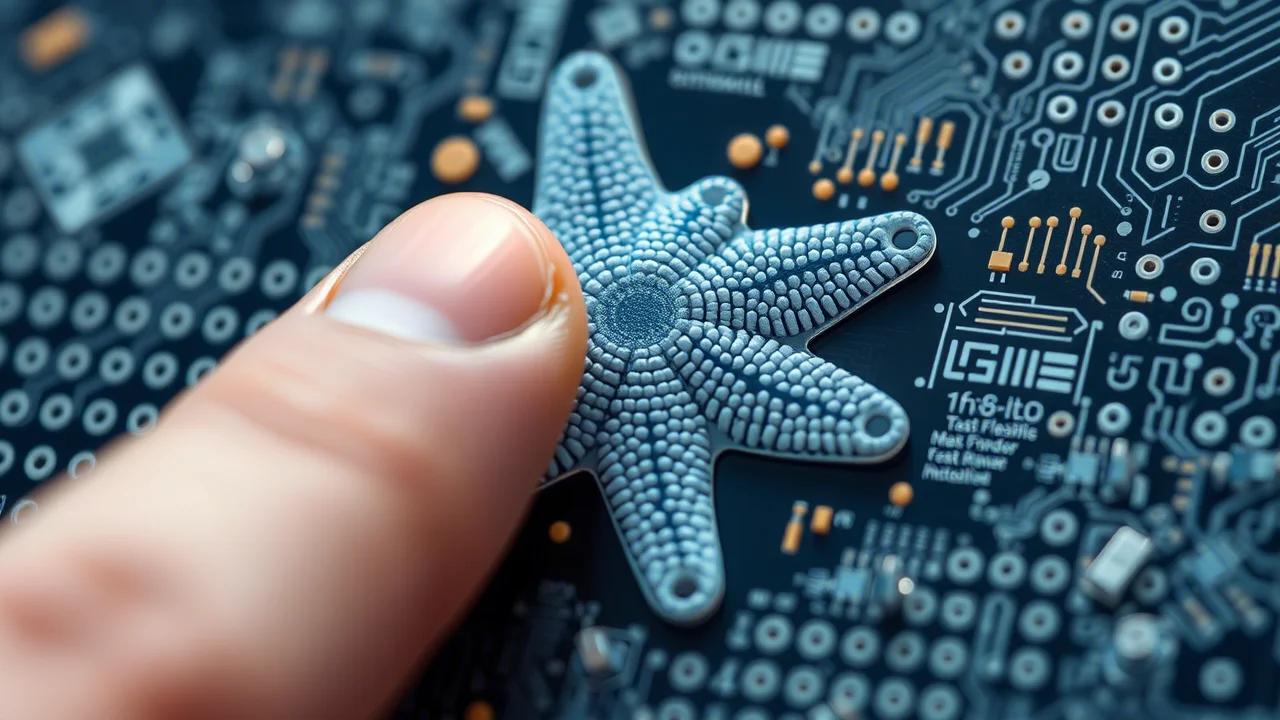
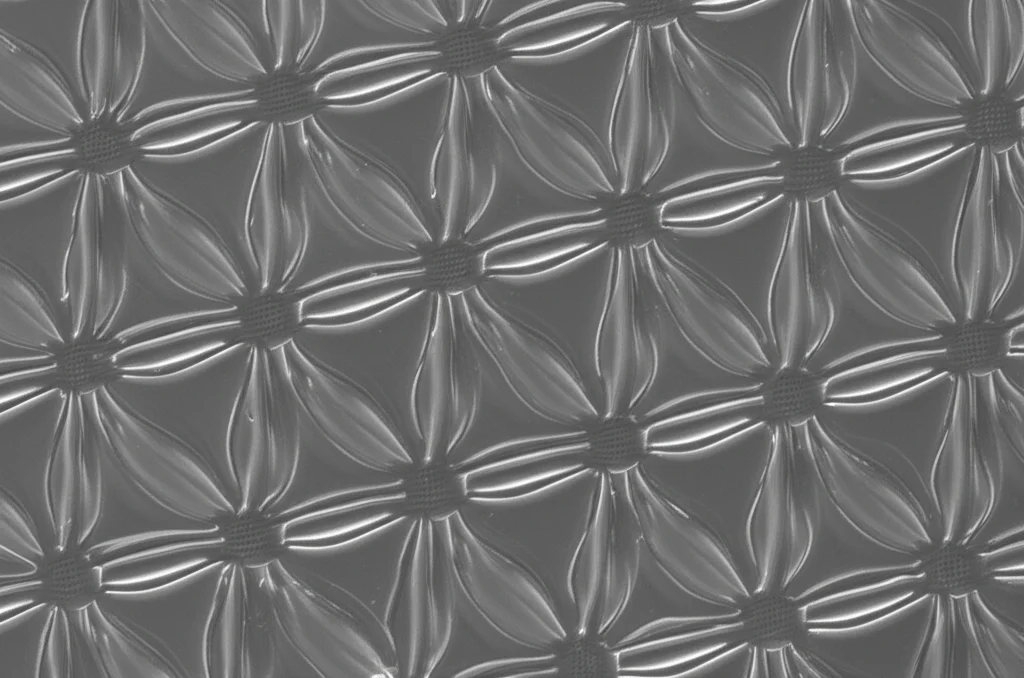
Per la parte del “tocco”, ci siamo guardati intorno in natura. E chi ha una superficie interessante e funzionale? La stella marina! In particolare, la specie *Astropecten polyacanthus*. La sua superficie ha delle microstrutture pazzesche, a forma di clessidra. Perché sono speciali? Questa forma concentra lo stress meccanico in punti specifici quando viene premuta, rendendola incredibilmente sensibile.
Abbiamo quindi pensato: “E se copiassimo questa struttura?”. Detto, fatto! Abbiamo creato un sensore di pressione capacitivo utilizzando un polimero flessibile (il PDMS, una specie di silicone) modellato proprio come la superficie della stella marina. Questo strato microstrutturato, inserito tra due elettrodi trasparenti e flessibili, è diventato il nostro “recettore tattile”.
Il risultato? Un sensore flessibile con una sensibilità altissima e capace di rilevare un’ampia gamma di pressioni: da quelle leggerissime, inferiori a 1 kPa (pensate a una carezza), fino a pressioni più forti, fino a 100 kPa (come una stretta decisa). Praticamente, copre un range simile a quello della pelle umana! La forma a clessidra, con il suo alto rapporto tra altezza e larghezza (aspect ratio circa 3), è stata la chiave per ottenere questa sensibilità e stabilità su un range così vasto. Abbiamo visto, tramite simulazioni e test, che questa struttura deforma in modo ottimale, concentrando lo stress e massimizzando la variazione di capacità elettrica (il segnale che leggiamo) anche per pressioni minime.
Abbiamo testato questi sensori in lungo e in largo. Rispondono velocemente (meno di 50 millisecondi!), sono affidabili anche dopo migliaia di cicli di pressione, resistono bene alle variazioni di temperatura e riescono a percepire pressioni minuscole, fino a 2.5 Pascal! Pensate che li abbiamo usati per monitorare il battito del polso e i movimenti articolari, con risultati ottimi e riproducibili. La cosa bella è che questa tecnologia, ispirata direttamente dalla biologia, è anche potenzialmente scalabile ed economica da produrre, senza bisogno di processi complicatissimi.
Il “Neurone” Flessibile: Il Memristore Entra in Scena
Ok, abbiamo il “recettore” super sensibile. Ma per il “near-sensor computing” serve anche un elemento che elabori, un piccolo “cervello” locale. Qui entrano in gioco i memristori. Cosa sono? Immaginateli come resistenze elettriche la cui resistenza non è fissa, ma cambia in base alla corrente che le ha attraversate in passato. Hanno una specie di “memoria”! E la cosa fantastica è che possono essere resi flessibili.
Abbiamo sviluppato dei memristori flessibili basati su un fenomeno chiamato “metallizzazione elettrochimica” (ECM). In pratica, usiamo un elettrodo d’argento che, sotto stimolo elettrico, rilascia ioni. Questi ioni migrano attraverso uno strato polimerico (nel nostro caso, poli(vinil cinnamato)) creando dei filamenti conduttivi sottilissimi. La formazione e la dissoluzione di questi filamenti cambiano la resistenza del dispositivo.
Il bello è che possiamo controllare quanto questi filamenti siano stabili agendo sulla corrente. Con poca corrente, i filamenti sono instabili e la “memoria” è a breve termine (Short-Term Plasticity, STP), proprio come alcune sinapsi nel nostro cervello. Con più corrente, i filamenti diventano stabili e la memoria è a lungo termine (Long-Term Plasticity, LTP), come altre sinapsi. Questa capacità di modulare la “volatilità” della memoria è fondamentale per mimare le funzioni neuronali. I nostri memristori flessibili hanno dimostrato di funzionare egregiamente, mostrando sia STP che LTP in risposta a impulsi elettrici, e mantenendo le loro prestazioni anche quando piegati ripetutamente (fino a un raggio di curvatura di 5 mm!). Sono stabili, riproducibili e pronti per diventare i nostri neuroni artificiali.
L’Unione Fa la Forza: Nasce il Sistema Nervoso Tattile Artificiale
Ed eccoci al dunque: abbiamo unito il nostro sensore capacitivo ispirato alla stella marina (il recettore) con il nostro memristore flessibile (il neurone). Il risultato è un sistema nervoso tattile artificiale. Come funziona? Quando applichiamo una pressione sul sensore, la sua capacità elettrica cambia. Se integriamo questo sensore in un circuito con il memristore e applichiamo un impulso di tensione, il sensore capacitivo genera una corrente *transiente* (cioè temporanea, solo durante la fase di carica/scarica). L’ampiezza e la durata di questa corrente dipendono dalla pressione applicata, grazie all’alta sensibilità del nostro sensore.
Questa corrente transiente va a stimolare il memristore. Se la pressione (e quindi la corrente) supera una certa soglia, può modificare lo stato del memristore, facendolo passare da alta a bassa resistenza (mimando l’attivazione di un neurone).
La vera magia sta nell’efficienza energetica. Poiché usiamo un sensore *capacitivo*, la corrente significativa fluisce solo per brevi istanti durante la variazione di pressione o durante la lettura con impulsi. Non c’è un flusso continuo di corrente come nei sistemi basati su sensori resistivi. Questo approccio “bio-realistico” ci ha permesso di raggiungere consumi energetici incredibilmente bassi, vicinissimi a quelli dei sistemi biologici!
Applicazione 1: Il Nocicettore Artificiale (Sentire il “Dolore”)
Una delle prime cose che abbiamo testato è stata la creazione di un nocicettore artificiale. I nocicettori sono i nervi sensoriali che nel nostro corpo rilevano stimoli potenzialmente dannosi (pressione eccessiva, calore, ecc.) e scatenano la sensazione di dolore. Devono avere caratteristiche precise:
- Soglia: Si attivano solo se lo stimolo supera un certo livello.
- Rilassamento: Il segnale cessa quando lo stimolo finisce.
- Nessun Adattamento: Non si “abituano” a uno stimolo dannoso continuo.
- Sensibilizzazione: Dopo un “danno” (uno stimolo molto forte), diventano più sensibili (iperalgesia) e si attivano anche per stimoli normalmente innocui (allodinia).
Il nostro sistema tattile artificiale è riuscito a replicare tutte queste funzioni! Applicando pressioni crescenti, abbiamo visto che il memristore cambiava stato (e la corrente in uscita aumentava bruscamente) solo sopra una certa soglia di pressione (es. 2.50 kPa). Dopo uno stimolo forte, il sistema tornava gradualmente allo stato iniziale se stimolato con pressioni sotto soglia (rilassamento, grazie alla STP del memristore). Sotto stimoli ripetuti sopra soglia, la risposta rimaneva costante (nessun adattamento). E, cosa più interessante, dopo aver applicato una pressione molto alta (simulando un “infortunio”, es. 10 o 15 kPa), il sistema diventava più reattivo a pressioni minori e la soglia di attivazione si abbassava (iperalgesia e allodinia). Abbiamo anche dimostrato uno stato di “infortunio” trattabile: una pressione ancora più alta rendeva il cambiamento nel memristore permanente (LTP), ma potevamo “curarlo” applicando un impulso elettrico inverso (generato dalla scarica del sensore con un impulso di tensione negativo) per resettare il memristore.
Il tutto con un consumo energetico per l’operazione di nocicezione stimato intorno ai 140 picoJoule (pJ). Parliamo di miliardesimi di Joule! Un’efficienza pazzesca rispetto ad altri approcci.

Applicazione 2: Elaborazione di Impronte Digitali a Basso Consumo
Ma le potenzialità non finiscono qui. Abbiamo spinto il concetto di near-sensor computing ancora oltre, immaginando un’applicazione per l’elaborazione di immagini tattili, come quelle delle impronte digitali. Abbiamo simulato (usando LTspice) un sistema basato su un array dei nostri sensori e memristori per eseguire operazioni direttamente “sul posto”.
Abbiamo configurato un array 3×3 di sensori/memristori per funzionare come un filtro mediano, una tecnica comune per ridurre il rumore nelle immagini. Ogni memristore è stato “addestrato” a uno stato di resistenza specifico. Leggendo la corrente sommata dall’array in risposta a un’impronta digitale “rumorosa” (a cui avevamo aggiunto disturbo digitale), il sistema è stato in grado di ricostruire l’immagine originale con un’accuratezza di circa il 93%!
Poi abbiamo provato con l’edge detection, cioè l’identificazione dei contorni dell’impronta. Usando una configurazione leggermente diversa delle resistenze dei memristori (simulando pesi positivi e negativi), il sistema è riuscito a estrarre i bordi dell’impronta digitale applicata.
La cosa più sbalorditiva? Il consumo energetico per queste operazioni di calcolo distribuito. Per processare un’immagine di impronta digitale di 60×60 pixel, il consumo medio per pixel è stato stimato in circa 2.2 femtoJoule (fJ). Femto! Parliamo di milionesimi di miliardesimi di Joule! Siamo davvero a livelli di efficienza energetica paragonabili a quelli del cervello umano.

Verso il Futuro: Elettronica Indossabile e IA Bio-Realistica
Cosa significa tutto questo? Che abbiamo sviluppato un approccio robusto per creare nervi tattili artificiali con un’efficienza energetica incredibilmente vicina a quella biologica. La combinazione di sensori capacitivi ispirati alla natura (la stella marina!) e memristori flessibili apre porte enormi per il futuro del near-sensor computing.
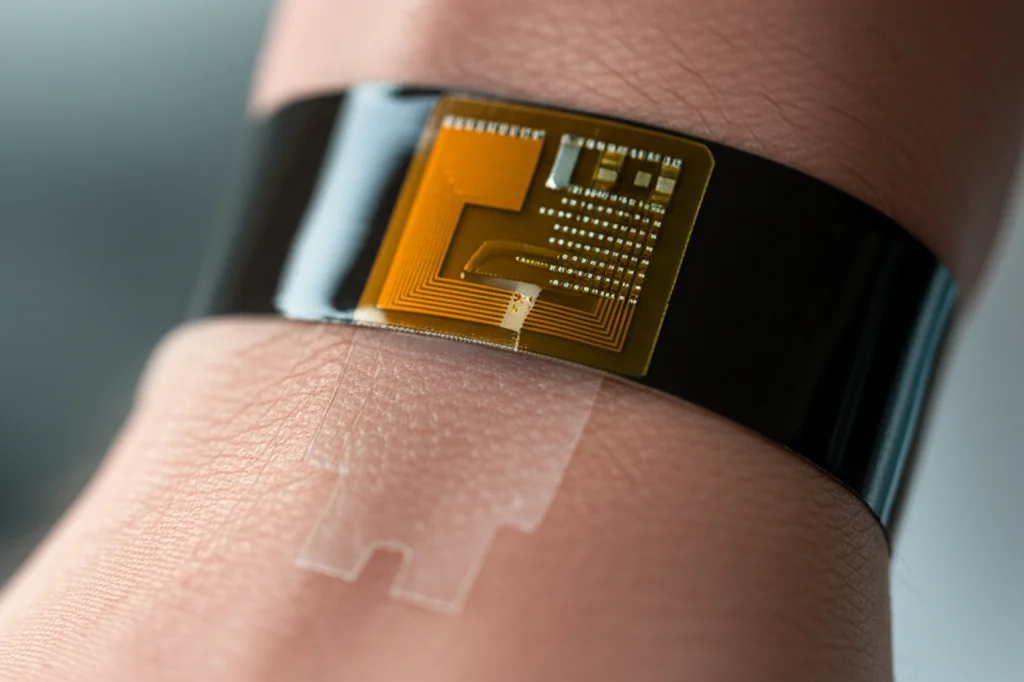
Immaginate dispositivi indossabili che non solo sentono il mondo intorno a noi con una sensibilità simile alla nostra, ma che possono anche elaborare queste informazioni localmente, in modo intelligente e consumando pochissimo. Pensate a protesi più realistiche, robot con un senso del tatto più raffinato, interfacce uomo-macchina più intuitive, o sistemi di monitoraggio della salute più discreti ed efficienti.
Credo davvero che questa strategia, che unisce ispirazione biologica, scienza dei materiali avanzata e architetture di calcolo innovative, sia un passo importante verso la prossima generazione di sistemi neuromorfici e verso la realizzazione di un’intelligenza artificiale sempre più “bio-realistica”. Siamo solo all’inizio, ma sono entusiasta delle possibilità!
Fonte: Springer





