Oscillazioni Ribelli: Come Molle, Piezoelettrici e Controllo Danzano Insieme per Energia e Stabilità
Ciao a tutti, appassionati di scienza e tecnologia! Oggi voglio portarvi con me in un viaggio affascinante nel mondo delle vibrazioni meccaniche, ma non quelle noiose e prevedibili. Parleremo di oscillazioni non lineari, quelle un po’ matte e imprevedibili, e di come possiamo non solo domarle, ma anche sfruttarle per produrre energia! Sembra fantascienza? Seguitemi e vedrete.
Il Cuore del Sistema: Masse, Molle e un Tocco Piezoelettrico
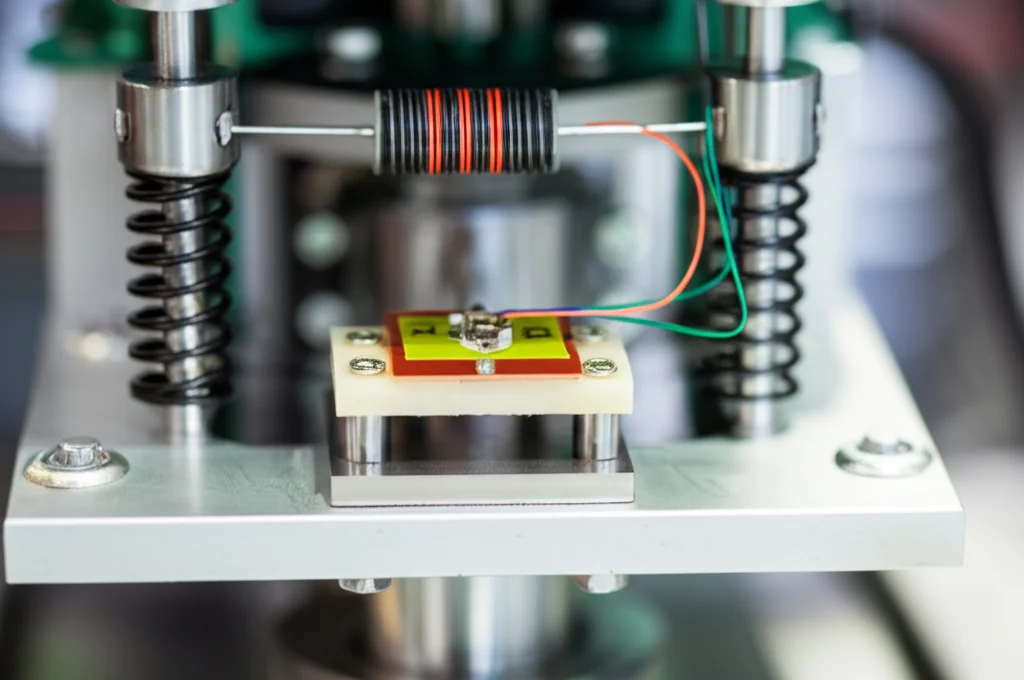
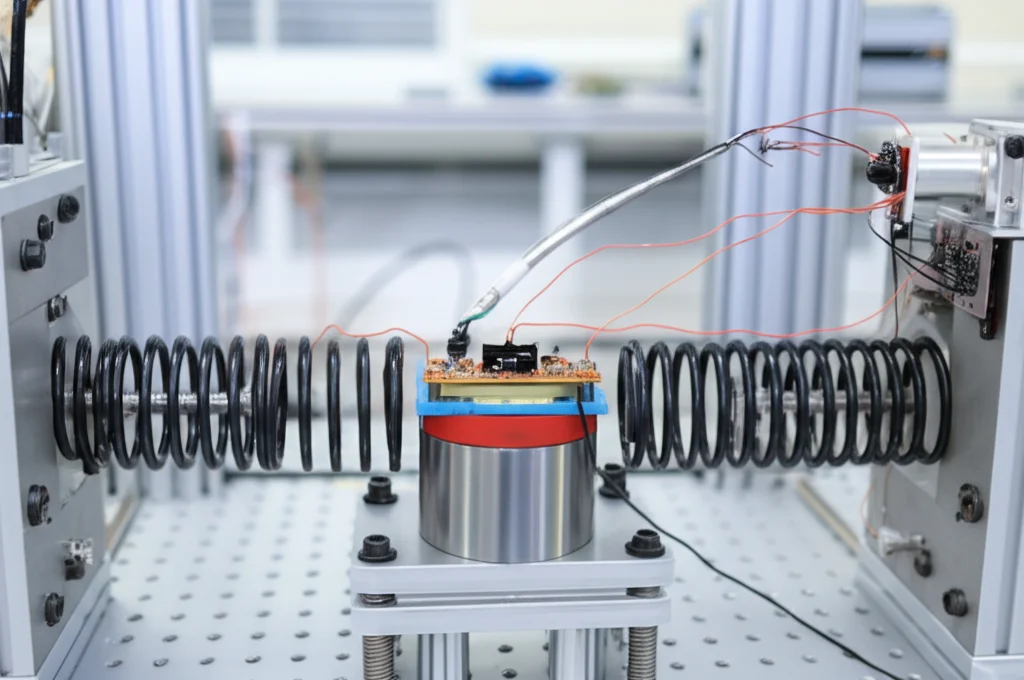
Immaginate un sistema apparentemente semplice: una massa, come un piccolo peso, che può muoversi avanti e indietro. Questa massa è collegata a una parete fissa, ma non con una molla qualsiasi. Ne usiamo due, collegate una dopo l’altra (tecnicamente si dice “in serie”), e queste molle non sono “lineari” (cioè la forza non è semplicemente proporzionale allo spostamento), ma hanno un comportamento più complesso, detto “cubico”. Già questo rende le cose interessanti.
Aggiungiamo poi uno smorzatore viscoso (pensate a un piccolo ammortizzatore che frena il movimento) e una forza esterna che spinge e tira la massa con un ritmo regolare (una forzante armonica). Ma la vera chicca è l’aggiunta di un dispositivo piezoelettrico. Cos’è? È un materiale speciale che, se sottoposto a stress meccanico (come le vibrazioni della nostra massa), genera una tensione elettrica. Avete capito bene: trasformiamo il movimento in elettricità! Questo processo si chiama energy harvesting (EH), ovvero “raccolta di energia”.
Infine, per evitare che il sistema vada fuori controllo, soprattutto in certe condizioni critiche, implementiamo un controllore a feedback negativo di velocità (NVF). In pratica, misuriamo la velocità della massa e usiamo questa informazione per applicare una forza che si oppone al movimento, smorzando le vibrazioni eccessive.
La Sfida: Vibrazioni Indesiderate e la Magia del Controllo
Perché ci preoccupiamo tanto delle vibrazioni? Beh, in molte applicazioni ingegneristiche (pensate a ponti, aerei, automobili, ma anche a dispositivi elettronici delicati), le vibrazioni eccessive possono essere un vero disastro. Specialmente quando la frequenza della forza esterna si avvicina alla frequenza naturale del sistema, entriamo in risonanza. In questa condizione, le ampiezze delle oscillazioni possono crescere a dismisura, portando a stress meccanici elevati, rumore, malfunzionamenti e, nei casi peggiori, a rotture catastrofiche.
Ecco dove entra in gioco il nostro controllore NVF. Il suo scopo è proprio quello di tenere a bada queste oscillazioni potenzialmente dannose, agendo come un freno intelligente che interviene quando la velocità diventa troppo alta, soprattutto vicino alla risonanza. L’obiettivo è rendere il sistema più sicuro, affidabile e longevo.
Come Abbiamo Studiato Questo Intreccio Complesso
Descrivere matematicamente un sistema del genere non è una passeggiata. Le molle non lineari, il dispositivo piezoelettrico (che introduce un’interazione tra meccanica ed elettricità) e il controllo rendono le equazioni piuttosto complicate. Abbiamo usato le potenti equazioni di Lagrange per derivare il modello matematico principale, che risulta essere un sistema di equazioni differenziali-algebriche (DAE).
Per risolvere queste equazioni e capire come si comporta il sistema nel tempo, abbiamo adottato un approccio combinato:
- Metodo delle Scale Multiple (MSM): Una tecnica analitica (o quasi) che ci permette di trovare soluzioni approssimate, particolarmente utile per studiare il comportamento vicino alla risonanza e capire l’influenza dei vari parametri. Siamo arrivati fino al terzo ordine di approssimazione per una buona precisione.
- Metodi Numerici (Runge-Kutta di 4° ordine – RK4): Abbiamo usato potenti algoritmi al computer per risolvere le equazioni in modo numerico, ottenendo una sorta di “verità” a cui confrontare le nostre soluzioni approssimate. Il confronto ci ha dato grande fiducia nella validità del metodo MSM.
Abbiamo utilizzato software come Wolfram Mathematica e MATLAB per calcolare, simulare e visualizzare i risultati: grafici temporali, curve di risposta in frequenza, diagrammi di biforcazione e mappe di Poincaré (ne parleremo tra poco!).
Risultati Sorprendenti: Domare le Onde e Accendere la Luce
Cosa abbiamo scoperto? Prima di tutto, l’efficacia del controllo NVF è stata notevole! Nelle simulazioni in condizioni di risonanza, senza controllo, le ampiezze delle oscillazioni schizzavano a livelli pericolosi. Attivando il controllore NVF (con un guadagno G=5 nei nostri test), abbiamo ottenuto una riduzione drastica: l’ampiezza dello spostamento della massa (`x2`) è diminuita del 99.41%, e l’ampiezza della tensione generata dal piezoelettrico (V) è calata del 98.76%. Missione compiuta per il controllo!
Ovviamente, ridurre le vibrazioni significa anche ridurre l’energia meccanica disponibile per il dispositivo piezoelettrico. C’è un trade-off: vogliamo controllo, ma vogliamo anche raccogliere energia. Tuttavia, anche con il controllo attivo, il sistema continua a vibrare (seppur molto meno) e il piezoelettrico continua a generare energia elettrica utile, trasformando quelle che sarebbero vibrazioni “sprecate” o dannose in una piccola fonte di alimentazione. Abbiamo visualizzato la potenza (`p_out`) e l’energia (E) generate nel tempo, mostrando come sia possibile ottenere un flusso costante, seppur piccolo, di energia.
Stabilità, Caos e Parametri Chiave
Andando più a fondo, abbiamo analizzato la stabilità del sistema. Utilizzando le curve di risposta in frequenza, abbiamo identificato le regioni di parametri (come la frequenza della forzante esterna `Ω` o la sua ampiezza `F0`) in cui il sistema si comporta in modo stabile e prevedibile (punti fissi stabili, curve continue nei grafici) e quelle in cui diventa instabile (punti fissi instabili, curve tratteggiate), potenzialmente portando a comportamenti complessi. Abbiamo visto come aumentare il guadagno del controllo `G` o lo smorzamento `C` allarghi le regioni di stabilità, rendendo il sistema più robusto. Al contrario, aumentare l’ampiezza della forzante `f` (versione normalizzata di `F0`) può portare all’instabilità.
E qui entra in gioco il lato “selvaggio” delle oscillazioni non lineari: il caos. Modificando alcuni parametri, come l’ampiezza della forzante `f`, il sistema può passare da un comportamento periodico semplice a uno caotico, dove il movimento diventa imprevedibile e apparentemente casuale, pur essendo governato da leggi deterministiche. Abbiamo visualizzato questo passaggio usando:
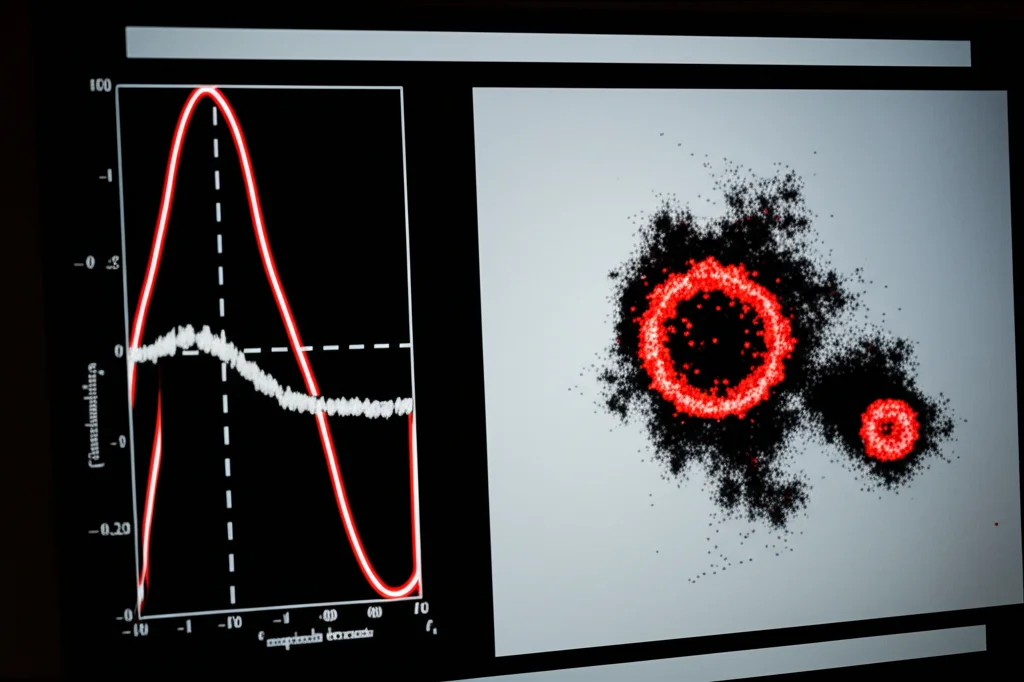
- Diagrammi di Biforcazione: Mostrano come cambia il comportamento a lungo termine del sistema (ad esempio, i valori massimi dello spostamento `x2`) al variare di un parametro (`f`). Si vedono passaggi da un singolo punto (moto periodico) a due punti (raddoppio del periodo), poi quattro, otto, fino a una nuvola di punti (caos).
- Mappe di Poincaré (PMs): Sono come “istantanee” dello stato del sistema prese a intervalli regolari. Nel moto periodico, i punti sulla mappa formano figure semplici (pochi punti isolati o una curva chiusa). Nel caos, i punti si spargono in modo complesso e frattale.
Abbiamo osservato che, senza controllo, il sistema entra nel caos per valori relativamente bassi della forzante `f`. Con il controllo NVF attivo, il sistema rimane stabile per un intervallo molto più ampio di `f`, dimostrando ancora una volta la sua efficacia nel “civilizzare” il comportamento del sistema. Il caos viene posticipato, non eliminato del tutto per forzanti molto elevate, ma la finestra operativa sicura è notevolmente ampliata.
Perché Tutto Questo è Importante?
Questo studio, anche se può sembrare molto teorico, ha implicazioni pratiche enormi. Sistemi come quello che abbiamo analizzato si trovano in tantissime applicazioni:
- Energy Harvesting: Alimentare piccoli sensori wireless (per monitoraggio strutturale, medico, ambientale) senza bisogno di batterie, sfruttando le vibrazioni ambientali.
- Controllo Attivo delle Vibrazioni: Migliorare il comfort e la sicurezza in veicoli, ridurre il rumore in macchinari industriali, proteggere strutture civili da terremoti o vento.
- Attuatori e Sensori: I materiali piezoelettrici sono usati anche al contrario (applico tensione, ottengo movimento) in attuatori di precisione, iniettori per motori, altoparlanti, microfoni.
La combinazione di raccolta di energia e controllo delle vibrazioni apre la strada a sistemi più autonomi, efficienti e intelligenti. Comprendere a fondo le dinamiche non lineari, la stabilità e il caos è fondamentale per progettare questi sistemi in modo efficace e sicuro.
Il nostro lavoro aggiunge un tassello importante a questa comprensione, analizzando specificamente la configurazione con molle in serie e l’interazione con il controllo NVF e l’harvesting piezoelettrico. I risultati sono incoraggianti e mostrano il potenziale di questo approccio integrato. La ricerca continua, ma speriamo che questo sguardo nel mondo delle oscillazioni controllate e produttive vi abbia affascinato quanto ha affascinato noi!
Fonte: Springer





