
Oscillatori Kirigami: La Danza Segreta dei Tagli che Rivoluziona le Vibrazioni!
Ciao a tutti, appassionati di scienza e curiosi! Oggi voglio portarvi con me in un viaggio affascinante, al confine tra un’arte antica e l’ingegneria più moderna. Parleremo di come dei semplici fogli di plastica, intagliati con precisione chirurgica, possano trasformarsi in sofisticati oscillatori con proprietà meccaniche incredibilmente programmabili. Sì, avete capito bene: stiamo per svelare i segreti degli oscillatori kirigami e delle loro risposte, sia libere che forzate, a dir poco sorprendenti.
Kirigami: Non Solo Carta Piegata, Ma Scienza delle Vibrazioni!
Molti conosceranno l’Origami, l’arte giapponese di piegare la carta. Ma forse meno noto è il suo “cugino”, il Kirigami, che oltre alla piegatura introduce anche l’arte del taglio. Nato per scopi decorativi, il Kirigami sta vivendo una seconda giovinezza, conquistando scienziati e ingegneri. Se l’Origami ha già ispirato un’infinità di strutture e materiali innovativi, il Kirigami è la nuova frontiera, con applicazioni che vanno dai robot capaci di afferrare oggetti a strutture che cambiano forma, passando per attuatori, sensori e metamateriali.
Nel nostro studio, però, ci siamo chiesti: e se usassimo il Kirigami per giocare con le vibrazioni? Un campo ancora poco esplorato, ma con un potenziale enorme. L’idea è stata quella di progettare, fabbricare e caratterizzare delle “molle kirigami”, ovvero fogli di plastica intagliati secondo schemi specifici, per capire come si comportano e come possiamo sfruttare la loro non linearità.
Ma Come Funziona Esattamente una Molla Kirigami?
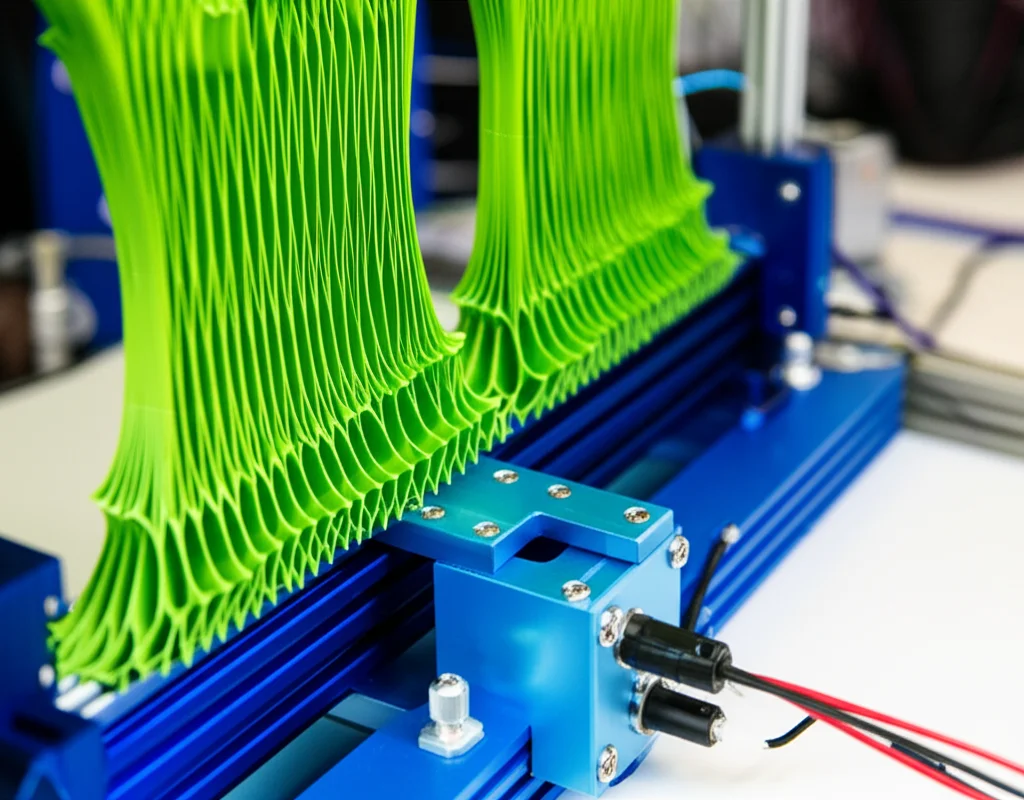
Immaginate un foglio di plastica. Ora, praticate una serie di tagli strategici. Quello che ottenete non è più un semplice foglio, ma una struttura che, se tirata o piegata, si comporta in modo del tutto peculiare. Le molle kirigami che abbiamo studiato utilizzano un pattern di tagli attentamente progettato che crea una rete di membrane interconnesse. Queste membrane sono disposte in modo tale da poter ruotare simultaneamente quando la struttura viene stirata o piegata.
Quando la molla kirigami viene tirata, le singole membrane ruotano, causando l’apertura delle fessure. Questo si traduce in un allungamento effettivo della struttura senza stirare direttamente il materiale stesso. È un po’ come una fisarmonica, ma molto più sofisticata! Questa interazione tra la rotazione delle membrane e l’apertura delle fessure permette una cedevolezza controllata e un comportamento meccanico non lineare. La cosa fantastica è che, cambiando la geometria dei tagli, possiamo “programmare” la rigidezza e le caratteristiche di deformazione della molla.
Per farla semplice, la forza di resistenza di una molla kirigami non deriva solo dalle proprietà del materiale, ma soprattutto dalle non linearità geometriche introdotte dai tagli. È come se avessimo un modo per modificare la “lunghezza efficace” della molla e quindi la sua rigidezza, semplicemente giocando con il pattern dei tagli.

Dalla Teoria alla Pratica: Creare le Nostre Molle Kirigami
Per mettere alla prova le nostre idee, abbiamo realizzato otto diversi pattern di kirigami, ispirandoci a lavori precedenti ma concentrandoci sull’aspetto dinamico. Abbiamo fissato la lunghezza dei tagli (l_c) a 12 mm e variato la spaziatura orizzontale (l_x) e verticale (l_y) tra di essi. Ogni pattern è stato designato con una nomenclatura tipo l_c/l_y – l_c/l_x. Ad esempio, il pattern “1-5” significa che la lunghezza del taglio l_c è uguale alla distanza verticale l_y, ed è cinque volte più grande della distanza orizzontale l_x.
Abbiamo anche introdotto il concetto di “numero effettivo di tagli” (N_eff) nella regione “programmabile” della molla, per correlare la densità dei tagli con il tipo di risposta meccanica osservata. Per fabbricare le nostre molle, abbiamo usato un cutter Silhouette Cameo per intagliare fogli di Grafix spessi circa 0.18 mm. Ogni molla era composta da tre segmenti: uno per il fissaggio, una sezione attiva “programmabile” di 80 mm, e un segmento per attaccare la molla a una massa o applicare un carico.
Mettere alla Prova la Rigidezza: I Test Quasi-Statici
Il primo passo è stato caratterizzare la rigidezza delle nostre molle. Abbiamo eseguito dei test di trazione quasi-statici, applicando un pre-stiramento assiale di 5 mm e poi caricando la molla trasversalmente. Per ogni molla, abbiamo effettuato cinque cicli di carico/scarico, registrando la relazione forza-spostamento. Abbiamo notato una minima isteresi, ma talmente piccola da poterla trascurare per i nostri scopi.
Analizzando le curve forza-spostamento, abbiamo cercato di fittarle con un modello matematico. Basandoci sulle nostre considerazioni teoriche, abbiamo ipotizzato che la forza di resistenza F potesse essere descritta da un polinomio cubico della forma:
F = k_1 x + k_3 x^3
dove x è lo spostamento, k_1 è la rigidezza lineare e k_3 è la rigidezza cubica. E i risultati ci hanno dato ragione! Il termine quadratico (k_2 x^2), quando incluso, si è rivelato trascurabile, confermando che la non linearità principale è di tipo cubico, proprio come ci aspettavamo dalla geometria del sistema. Questi test ci hanno permesso di determinare i coefficienti k_1 e k_3 per ogni pattern.
Capire lo Smorzamento: I Test Dinamici e il Modello Matematico
Ma la rigidezza è solo una parte della storia. Per capire appieno il comportamento di un oscillatore, dobbiamo conoscere anche lo smorzamento. Per questo, abbiamo condotto dei test modali. A differenza dei test statici, qui abbiamo montato due molle identiche in parallelo, collegate a un carrello libero di oscillare su una guida ad aria (per minimizzare l’attrito). Anche in questo caso, abbiamo applicato un pre-stiramento di 5 mm.
Abbiamo quindi modellato il sistema come un oscillatore di Helmholtz-Duffing con smorzamento non lineare. L’equazione del moto, in forma adimensionale, teneva conto di termini di smorzamento lineare, quadratico e cubico (ĉ_1, ĉ_2, ĉ_3) e di rigidezza lineare, quadratica e cubica (k̂_1, k̂_2, k̂_3). Perché introdurre uno smorzamento quadratico se non ce lo aspettavamo intrinsecamente dalla molla kirigami? Beh, la guida ad aria, pur riducendo l’attrito, introduce una forza di resistenza aerodinamica sul carrello, che è tipicamente quadratica con la velocità. E la rigidezza quadratica? Quella serve a tener conto di piccole asimmetrie dovute al montaggio non perfettamente allineato delle due molle.
Per determinare i coefficienti di smorzamento e la rigidezza quadratica, abbiamo impostato un problema di ottimizzazione: abbiamo cercato i valori di questi parametri che minimizzassero la differenza tra la risposta temporale misurata sperimentalmente e quella calcolata numericamente dal modello. Abbiamo usato i primi 10 secondi della risposta transitoria per questa identificazione.
Sotto Stress: Le Risposte Forzate e il Confronto con la Teoria
Una volta caratterizzato il sistema in termini di rigidezza e smorzamento, era il momento di vedere come si comportava sotto sollecitazione esterna, ovvero in regime di vibrazioni forzate. Abbiamo montato le nostre coppie di molle kirigami su una tavola vibrante (uno shaker) e le abbiamo sottoposte a un’eccitazione armonica di base a diverse accelerazioni (0.05g, 0.1g, e 0.2g), effettuando uno sweep di frequenza attorno alla risonanza primaria.
Abbiamo confrontato i risultati sperimentali con le soluzioni analitiche approssimate ottenute tramite il Metodo delle Scale Temporali Multiple (MMS), una tecnica matematica potente per analizzare sistemi non lineari. Anche se abbiamo usato solo un’approssimazione del primo ordine, l’accordo tra le ampiezze di vibrazione previste e quelle misurate è stato notevole, soprattutto nel catturare la forma della “backbone curve” (la curva che descrive come la frequenza di risonanza cambia con l’ampiezza) e la frequenza alla quale avviene il “salto” tipico dei sistemi non lineari hardening (dove la rigidezza aumenta con l’ampiezza).
Le discrepanze osservate, specialmente sull’ampiezza dei picchi, le attribuiamo principalmente allo smorzamento non lineare, in particolare quello quadratico dovuto alla resistenza aerodinamica, che diventa più influente a velocità più elevate tipiche delle vibrazioni forzate rispetto ai transitori liberi.
Cosa Abbiamo Imparato da Tutti Questi Esperimenti?
Beh, un sacco di cose interessanti!
- La densità dei tagli è regina: È il parametro dominante che influenza la risposta delle molle. Più alta è la densità dei tagli, più la molla è cedevole (meno rigida).
- Comportamento quasi-lineare vs. non lineare: Molle con alta densità di tagli (come i pattern 5-5, 3-6, 4-3) mostrano un comportamento quasi-lineare nei test statici. Man mano che la densità diminuisce, il comportamento non lineare diventa più pronunciato, probabilmente a causa di fenomeni di post-buckling della singola fessura.
- Smorzamento complesso: Le risposte transitorie di alcuni pattern (3-6, 4-3, 5-5) si discostano significativamente dal classico decadimento esponenziale, suggerendo la presenza di termini di smorzamento di ordine superiore che dominano il comportamento.
- Programmabilità: La scoperta più entusiasmante è il grado di programmabilità che questi semplici tagli offrono. Possiamo davvero “sintonizzare” la rigidezza e lo smorzamento del sistema, aprendo la porta a un design mirato delle proprietà dinamiche.
Ad esempio, confrontando le molle 5-5 e 3-2, abbiamo notato che sia la rigidezza lineare che quella cubica differivano di un ordine di grandezza, a causa della maggiore densità di tagli della molla 5-5. Questo dimostra come, scegliendo il pattern giusto, possiamo ottenere una vasta gamma di comportamenti meccanici.

Un Futuro Pieghevole e Tagliente: Le Applicazioni Potenziali
La possibilità di controllare la risposta costitutiva e di progettare sistemi le cui proprietà di rigidezza e smorzamento possono essere sintonizzate è estremamente promettente. Pensate alle applicazioni:
- Elettronica indossabile: Componenti che si adattano ai movimenti del corpo.
- Strutture aerospaziali adattive: Ali che cambiano forma o strutture che smorzano le vibrazioni in modo intelligente.
- Soft-robotics: Robot morbidi con movimenti più naturali e capacità di interazione sicura.
- Isolamento dalle vibrazioni: Protezione di dispositivi di precisione da scuotimenti indesiderati.
E non dimentichiamo l’aspetto didattico: la relativa economicità del setup e la sua semplicità rendono questo sistema ideale per insegnare concetti complessi di meccanica e vibrazioni in modo pratico e coinvolgente.
Certo, Qualche Puntino sulle “i” (Le Limitazioni)
Come ogni ricerca, anche la nostra ha delle limitazioni. Abbiamo trascurato il comportamento viscoelastico del materiale e gli effetti della fatica nelle “cerniere plastiche” create dai tagli. L’approssimazione per la relazione costitutiva è stata troncata al terzo ordine, che andava benissimo per le molle considerate, ma molle più cedevoli potrebbero richiedere forme polinomiali diverse. Abbiamo incluso le non linearità quadratiche per tener conto del disallineamento delle molle, ma queste potrebbero emergere anche da imperfezioni di fabbricazione. Infine, abbiamo ipotizzato che lo smorzamento non lineare potesse essere rappresentato in forma polinomiale, una scelta deliberata basata sull’assunzione che il comportamento dello smorzamento rispecchi quello della rigidezza.
Nonostante queste limitazioni, credo fermamente che il nostro lavoro apra una finestra su un mondo di possibilità. Gli oscillatori kirigami non sono solo un elegante esercizio accademico, ma un potente strumento che ci permette di plasmare le leggi della meccanica a nostro piacimento, un taglio alla volta. È la dimostrazione che, a volte, le soluzioni più innovative possono nascondersi nella semplicità di un’arte antica, reinterpretata con gli occhi della scienza moderna. E questo, per me, è semplicemente affascinante!
Fonte: Springer





