
Robot in Fuga dagli Ingorghi: Come Evitiamo Collisioni e Stalli nei Mini-Giochi Sociali!
Ciao a tutti! Avete mai pensato a come sarebbe il mondo se i robot potessero muoversi tra di noi, negli stessi spazi affollati, senza creare ingorghi o, peggio, scontrarsi? Immaginate robot che consegnano pacchi, assistono persone in ospedale o lavorano fianco a fianco in magazzino. Sembra fantascienza, ma è una sfida su cui sto lavorando intensamente!
Il problema è che far navigare più robot in spazi ristretti, come porte strette o incroci affollati, è incredibilmente complesso. Noi umani ce la caviamo abbastanza bene: con uno sguardo, un piccolo cenno o un leggero rallentamento, riusciamo a coordinarci quasi senza pensarci. Ma per i robot? È tutta un’altra storia. Spesso finiscono per bloccarsi a vicenda – quello che in gergo chiamiamo deadlock – o, nel peggiore dei casi, per urtarsi.
La Sfida dei “Mini-Giochi Sociali”
Ho iniziato a chiamare queste situazioni complicate “mini-giochi sociali”. Pensate a due persone che cercano di passare contemporaneamente da una porta stretta. Istintivamente, una delle due rallenta leggermente, quasi impercettibilmente, per far passare l’altra, senza però fermarsi del tutto o deviare troppo dal proprio percorso. Replicare questa fluidità e “intelligenza sociale” nei robot è difficilissimo.
Le sfide principali sono due:
- Coordinazione Decentralizzata: Se ogni robot pensa solo per sé (come spesso accade nei sistemi decentralizzati, dove non c’è un “cervellone” centrale che dirige tutti), anche con sensori perfetti, si rischiano deadlock, collisioni o movimenti a scatti, poco naturali.
- Movimenti Umani vs. Robotici: Noi umani siamo maestri nell’evitare collisioni e stalli con aggiustamenti minimi alla nostra velocità o traiettoria preferita. I robot, invece, faticano a emulare queste manovre “socialmente adattive” mantenendo una velocità costante o desiderata.
Il mio obiettivo, quindi, è stato quello di sviluppare un algoritmo di navigazione che permettesse a più robot di muoversi in questi “mini-giochi sociali” in modo sicuro, senza deadlock, e il più possibile simile a come faremmo noi umani.
Il Nostro Obiettivo: Navigazione Fluida e Sicura
Per rendere la navigazione dei robot più “umana”, abbiamo definito alcune condizioni necessarie che il nostro sistema doveva soddisfare:
- Niente Collisioni: L’algoritmo deve garantire che i robot non si scontrino mai. La sicurezza prima di tutto!
- Niente Deadlock (Liveness): Il sistema deve essere in grado non solo di risolvere i deadlock una volta che si verificano, ma idealmente di prevenirli in modo intelligente e poco invasivo.
- Rispetto dei Limiti Fisici: I robot, come noi, hanno limiti di velocità, accelerazione e manovra (vincoli cinematici e dinamici). L’algoritmo deve tenerne conto e funzionare su robot reali.
Inoltre, abbiamo considerato che i robot nel nostro scenario operano in modo decentralizzato (ognuno decide per sé), sono non-cooperativi (ognuno ottimizza il proprio obiettivo, non uno globale) e hanno una osservabilità parziale (vedono solo ciò che i loro sensori rilevano nelle vicinanze).
La Nostra Soluzione: Sicurezza Garantita con le CBF
Per garantire la sicurezza, ovvero evitare le collisioni, ci siamo affidati a uno strumento matematico molto potente chiamato Control Barrier Functions (CBFs), applicato in un contesto di controllo predittivo (Model Predictive Control – MPC) a tempo discreto. Immaginate le CBF come una sorta di “scudo di sicurezza virtuale” attorno a ogni robot. Queste funzioni matematiche ci permettono di definire delle zone sicure e di calcolare i comandi di movimento (velocità, sterzata) in modo che il robot rimanga sempre all’interno di queste zone sicure, evitando collisioni con ostacoli statici e altri robot.
L’approccio MPC-CBF è fantastico perché permette di pianificare le mosse del robot su un orizzonte temporale futuro (anche se breve), tenendo conto dei suoi limiti fisici e garantendo la sicurezza passo dopo passo. È come guidare guardando non solo l’ostacolo immediatamente davanti, ma anche un po’ più in là, anticipando le manovre necessarie.
La Svolta: Prevenire i Deadlock con le “Liveness Sets”
Ma la vera novità del nostro lavoro sta nel modo in cui affrontiamo i deadlock. Molti approcci esistenti si limitano a risolvere un deadlock una volta che si è già verificato, spesso costringendo i robot a manovre brusche o poco efficienti (come seguire la regola della mano destra o fare perturbazioni casuali). Noi volevamo fare di più: volevamo prevenire i deadlock prima ancora che accadessero, e farlo nel modo meno invasivo possibile.
L’intuizione chiave è stata questa: i deadlock nei “mini-giochi sociali” nascono spesso da una perfetta simmetria nella configurazione dei robot (ad esempio, due robot che arrivano esattamente nello stesso momento a una porta, alla stessa velocità). Abbiamo sfruttato le proprietà geometriche di queste situazioni per sviluppare un meccanismo di rilevamento e prevenzione.
Abbiamo introdotto il concetto di “liveness function”, una funzione matematica che misura il “rischio di deadlock” basandosi sulle posizioni e velocità relative dei robot. Quando questa funzione scende sotto una certa soglia, significa che siamo in una potenziale situazione di stallo.
E qui entra in gioco la nostra idea delle “liveness sets” (insiemi di vitalità). Questi sono insiemi di combinazioni di velocità per i robot coinvolti che garantiscono l’assenza di deadlock. Se rileviamo un rischio di deadlock (la liveness function è troppo bassa), il nostro algoritmo calcola la minima perturbazione di velocità necessaria per “spingere” le velocità attuali dei robot all’interno della liveness set più vicina. In pratica, uno dei robot deve leggermente accelerare o decelerare (idealmente, senza cambiare direzione) quel tanto che basta per rompere la simmetria e permettere a tutti di passare fluidamente. È una sorta di “negoziazione” implicita e decentralizzata basata sulla fisica!
Questa perturbazione è minimamente invasiva perché:
- Idealmente, non fa deviare il robot dalla sua traiettoria preferita (agisce solo sulla velocità lineare).
- È la più piccola modifica di velocità possibile che garantisce di uscire dalla zona di pericolo deadlock.
Gestire Casi Complessi: Pareggi e Interazione Umana
Cosa succede se due robot hanno esattamente la stessa velocità e priorità in una situazione critica? Per rompere questi “pareggi” perfetti, abbiamo implementato un protocollo di asta decentralizzata. Ogni robot “punta” un valore che rappresenta la sua urgenza o priorità (un parametro privato). Un meccanismo di asta virtuale assegna l’ordine di passaggio in base alle puntate, garantendo una risoluzione ottimale anche in questi casi limite.
E con gli umani? Gli umani sono imprevedibili! Non possiamo aspettarci che seguano esattamente le nostre regole matematiche. Quindi, nelle interazioni uomo-robot, abbiamo reso il robot più “responsabile”. Se si profila un deadlock con un umano, è il robot che si adatta completamente, modificando la sua velocità (rallentando o accelerando, a seconda della situazione) quel tanto che basta per garantire il passaggio sicuro di entrambi, anche se questo significa deviare un po’ di più dal suo comportamento ideale “minimamente invasivo”. La sicurezza e la fluidità dell’interazione hanno la priorità.
Alla Prova dei Fatti: Simulazioni e Robot Reali
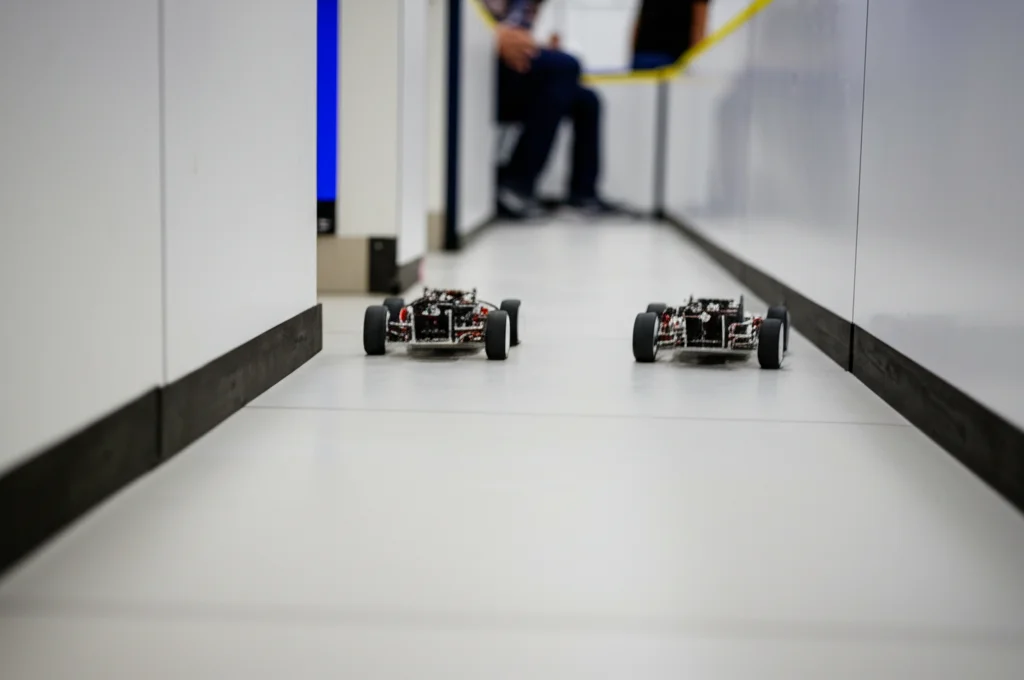
Naturalmente, non ci siamo fermati alla teoria! Abbiamo testato il nostro approccio sia in simulazioni dettagliate che su robot fisici reali. Abbiamo usato una varietà di piattaforme: le agili auto F1/10 dell’UT Automata, il robusto Clearpath Jackal e persino il famoso robot quadrupede Spot di Boston Dynamics. Li abbiamo fatti navigare in scenari classici di “mini-giochi sociali”: passaggi stretti (doorway), incroci di corridoi (intersection) e corridoi affollati (hallway).
Abbiamo confrontato le prestazioni del nostro metodo (che chiamiamo MPC-CBF con prevenzione deadlock) con una vasta gamma di altri algoritmi di navigazione, sia centralizzati che decentralizzati, inclusi approcci basati su:
- Pianificazione geometrica reattiva (come ORCA e le sue varianti)
- Ottimizzazione (come NH-TTC, altri MPC)
- Apprendimento per rinforzo (come CADRL)
- Sistemi basati su aste
- L’approccio standard DWA (Dynamic Window Approach) usato in ROS (Robot Operating System)

I Risultati: Robot più Sicuri, Efficienti e… Umani!
I risultati sono stati davvero incoraggianti! Abbiamo misurato tutto con metriche precise: tasso di successo (quante volte i robot raggiungono la meta), tasso di collisione, tempo impiegato (makespan), fluidità del movimento (variazione media della velocità, deviazione dal percorso preferito) e persino il “tasso di flusso” (quanti robot riescono a passare attraverso uno spazio ristretto in un dato tempo).
Il nostro approccio ha dimostrato di essere:
- Più Sicuro: Tassi di collisione significativamente inferiori rispetto a molti baselines, specialmente quelli senza meccanismi specifici anti-deadlock.
- Più Efficiente: Tempi di completamento competitivi e, soprattutto, un tasso di flusso attraverso le strettoie molto simile a quello osservato negli studi sul movimento delle folle umane (circa 2.0 robot per metro al secondo)! Questo suggerisce che il nostro sistema non solo è efficiente a livello individuale, ma ottimizza anche il movimento collettivo.
- Più Fluido: La nostra strategia di prevenzione deadlock “minimamente invasiva” ha prodotto i movimenti più fluidi, con le minori variazioni di velocità e le minori deviazioni dal percorso ideale rispetto ad altri metodi di risoluzione deadlock (come le perturbazioni casuali o le regole fisse). I robot si muovono in modo più naturale e prevedibile.
Abbiamo visto i nostri robot (Spot, Jackal, F1/10) superare con successo porte e incroci dove altri algoritmi (come il DWA standard) portavano a collisioni o blocchi imbarazzanti. Anche nelle interazioni con umani, il nostro robot si è dimostrato capace di cedere il passo o accelerare in modo proattivo e fluido, evitando gli arresti bruschi o le collisioni viste con altri metodi.

Conclusioni e Prossimi Passi
In sintesi, abbiamo sviluppato un nuovo approccio per la navigazione multi-robot decentralizzata che garantisce sicurezza (grazie alle CBF) e previene attivamente i deadlock (grazie alle liveness sets e alla perturbazione minimamente invasiva) in scenari complessi come i “mini-giochi sociali”. Il bello è che funziona in tempo reale, su robot reali, e produce movimenti fluidi ed efficienti, quasi umani.
Certo, ci sono ancora limiti. La garanzia di sicurezza e liveness è attualmente locale (ogni robot la garantisce nel suo orizzonte di pianificazione) e l’approccio è stato testato principalmente su geometrie specifiche (porte, incroci, corridoi). Per il futuro, stiamo esplorando come integrare tecniche di machine learning per migliorare l’adattabilità e la scalabilità, come stabilire connessioni teoriche più forti con soluzioni globalmente ottimali (come l’equilibrio di Nash nei giochi), come estendere la soluzione a geometrie più generali e come rendere il sistema ancora più robusto agli errori di percezione.
La strada è ancora lunga, ma credo che questo lavoro sia un passo importante verso un futuro in cui i robot possano muoversi tra noi in modo sicuro, efficiente e socialmente consapevole. E voi, cosa ne pensate?
Fonte: Springer





