La Mano Robotica Frattale: Il Segreto per Afferrare (Quasi) Tutto!
Ciao a tutti! Oggi voglio parlarvi di qualcosa che mi ha davvero affascinato nel mondo della robotica. Avete presente le mani robotiche, quei manipolatori che vediamo nei film o nelle fabbriche? Be’, uno dei problemi più grandi è sempre stato far sì che riescano ad afferrare oggetti diversi, specialmente quelli pesanti o dalla forma strana, senza farli cadere o romperli. Sembra facile, ma vi assicuro che non lo è. Ma se vi dicessi che qualcuno ha trovato un’ispirazione geniale… nella geometria frattale? Sì, avete capito bene!
L’Idea Geniale: Un Gripper Ispirato ai Frattali
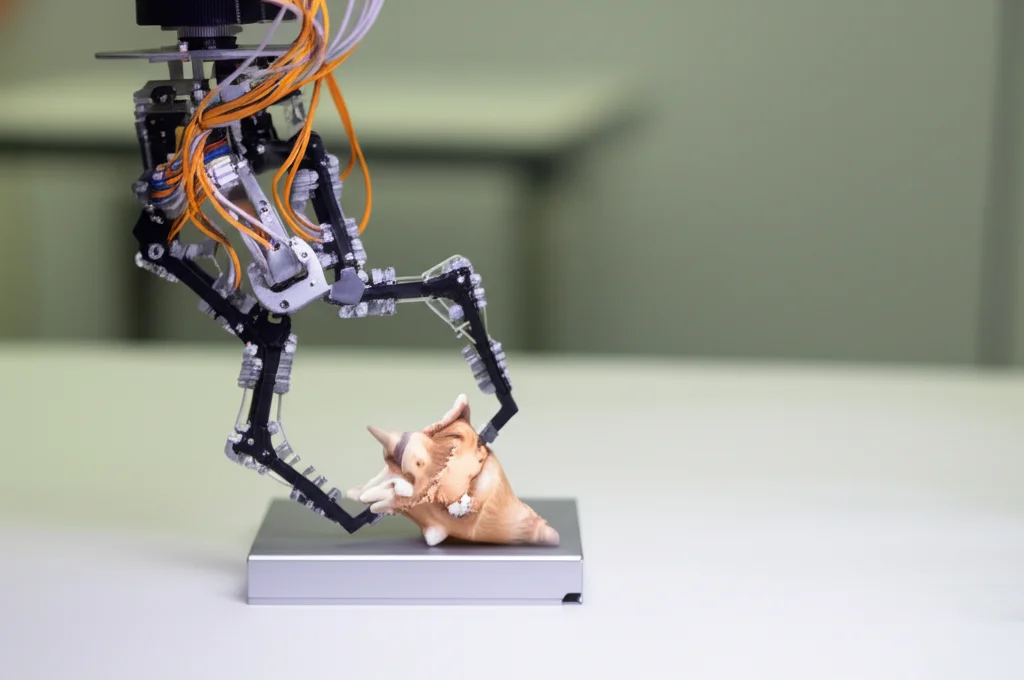
Immaginate una pinza, un gripper, che non ha solo due dita rigide, ma una struttura complessa, quasi come un albero con tanti rami che si adattano perfettamente alla forma di ciò che devono prendere. Ecco, questa è l’idea alla base del gripper frattale di cui vi voglio parlare. Prende spunto da un vecchio brevetto del 1913, la “Morsa Frattale” di Paulin Karl Kunze, un’idea all’epoca troppo complessa e costosa da realizzare. Ma oggi, con le nuove tecnologie come la stampa 3D, quel concetto è tornato prepotentemente alla ribalta, ma con delle marce in più!
Questo nuovo gripper non è solo una copia del passato. Combina la bellezza adattiva della geometria frattale con il buon vecchio principio della leva. Ogni “dito” del gripper è composto da unità più piccole, auto-simili (proprio come nei frattali!), che funzionano come tante piccole leve interconnesse. Questo permette una cosa fantastica: quando il gripper tocca un oggetto, la forza non si concentra in un solo punto, ma si distribuisce su tante piccole aree di contatto. Pensate a come afferrereste delicatamente un uovo o un frutto maturo: non stringereste con forza in un punto solo, vero? Cerchereste di distribuire la pressione. Ecco, questo gripper fa proprio questo, ma in modo automatico e intelligente, grazie alla sua struttura.
Adattabilità e Robustezza: I Superpoteri del Gripper Frattale
La vera magia sta nell’adattabilità multi-scala. Che si tratti di un piccolo oggetto duro o di un peluche morbido e informe, la struttura frattale permette alle “dita” di conformarsi alla superficie. Ogni segmento può ruotare leggermente, trovando la posizione migliore per avvolgere l’oggetto. Questo è possibile grazie a un design definito “sottoattuato”, il che significa che non serve un motore per ogni singolo snodo (sarebbe un incubo da controllare!), ma la struttura si adatta passivamente.
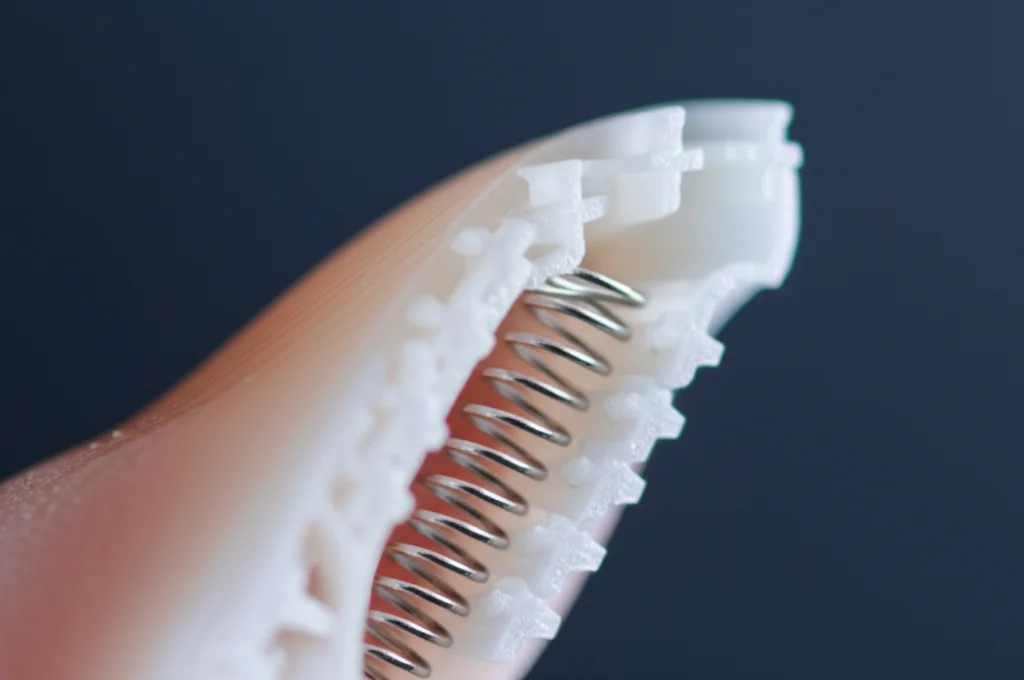
E non è finita qui. Hanno inserito delle molle nel design! Questo conferisce una caratteristica di auto-recupero: se una parte viene spostata o perde contatto, le molle la aiutano a tornare in posizione o a riadattarsi, garantendo una presa continua e robusta. Inoltre, il meccanismo di azionamento principale (una vite senza fine) ha una proprietà di autobloccaggio: una volta afferrato l’oggetto, anche se si toglie corrente al motore, la presa non si allenta! Una doppia sicurezza non da poco.
Per proteggere ulteriormente gli oggetti delicati, le superfici di contatto sono rivestite con uno strato di polimero flessibile (PDMS, una specie di silicone), che evita graffi e migliora ulteriormente la presa.
Modalità Commutabile: Grasping vs Gripping
Un’altra chicca di questo design è la modalità commutabile. Con un singolo motore aggiuntivo, il gripper può passare da una modalità “grasping” (avvolgente, ideale per oggetti morbidi o irregolari, come afferrare una mela) a una modalità “gripping” (a pinza, più adatta per oggetti duri dove basta una presa salda su punti specifici, come stringere un bullone). Questa versatilità lo rende adatto a una gamma ancora più ampia di compiti. Il passaggio da una modalità all’altra è reso possibile da un ingegnoso sistema di ingranaggi e leveraggi che modifica la configurazione delle dita.
La Prova dei Fatti: Dalla Teoria agli Esperimenti
Ovviamente, non bastano le belle idee. Bisogna dimostrare che funzionano! I ricercatori hanno fatto un gran lavoro sia a livello teorico che sperimentale. Hanno sviluppato modelli matematici (usando matrici Jacobiane e analizzando gli effetti di cedevolezza) per dimostrare la stabilità della presa. In pratica, hanno confermato che anche se l’oggetto viene leggermente disturbato, il sistema gripper-oggetto tende a rimanere stabile.
Poi sono passati ai test pratici. Hanno attaccato dei sensori di pressione sottilissimi sulle “dita” del gripper (realizzato in PLA con stampa 3D) e hanno misurato la distribuzione della forza mentre afferrava una bottiglia d’acqua. I risultati? Come previsto, la pressione era distribuita in modo molto più uniforme rispetto a un gripper tradizionale con dita piatte, dove la forza si concentra solo su pochi punti. Questo conferma la capacità del gripper frattale di maneggiare gli oggetti in modo più sicuro e delicato.

Ma i test più divertenti sono stati quelli di presa su oggetti reali! Hanno provato di tutto:
- Oggetti piccoli e duri (uova, conchiglie, giocattoli)
- Frutta e verdura di medie dimensioni (senza rovinarne la buccia!)
- Pupazzi morbidi, grandi e asimmetrici
- Oggetti piccolissimi e leggerissimi (come un filo d’erba da 0.2 grammi!)
- Hanno persino sollevato una bottiglia piena d’acqua pesante 865 grammi!
In tutti i casi, il gripper ha dimostrato una notevole capacità di adattarsi e mantenere una presa stabile, sia in modalità grasping che gripping. Impressionante, vero? Hanno anche dimostrato che può afferrare un acino d’uva senza romperlo, grazie alla distribuzione della forza e allo strato protettivo in PDMS (ma funziona anche senza!).

Perché è Importante e Cosa Ci Aspetta?
Questo tipo di gripper apre scenari interessantissimi. Pensate ai robot che ci aiuteranno in casa: dovranno saper maneggiare una miriade di oggetti diversi, dal cartone del latte alla frutta delicata. O in agricoltura, per la raccolta automatizzata, o persino in operazioni subacquee o industriali dove si devono manipolare oggetti pesanti e irregolari.
La bellezza di questo approccio è che l’intelligenza” non è solo nel software di controllo, ma è “incorporata” nella struttura stessa (quella che chiamano embodied intelligence). Certo, il prototipo attuale è controllato in modo semplice (con un telecomando wireless), ma il prossimo passo sarà integrarlo su un braccio robotico industriale e aggiungere sensori tattili per un controllo più sofisticato e a ciclo chiuso.
Insomma, partendo da un’idea vecchia di un secolo e combinandola con matematica, meccanica e nuove tecnologie di fabbricazione, siamo di fronte a un passo avanti notevole nel campo della manipolazione robotica. Non vedo l’ora di vedere dove ci porterà questa filosofia di design frattale!

Fonte: Springer





