
Aerei Più Elettrici: Come il Controllo Predittivo Rivoluziona i Convertitori QAB!
Ciao a tutti! Oggi voglio parlarvi di qualcosa che mi appassiona davvero: come stiamo rendendo gli aerei del futuro più efficienti e affidabili grazie a un pizzico di intelligenza nel controllo dell’elettronica di potenza. Nello specifico, ci tufferemo nel mondo affascinante dei convertitori DC-DC Quad Active Bridge (QAB) e di come una strategia chiamata Model Predictive Control (MPC), in una sua variante specifica, stia facendo la differenza.
Perché gli Aerei Più Elettrici (MEA) hanno bisogno di cervelli elettronici migliori?
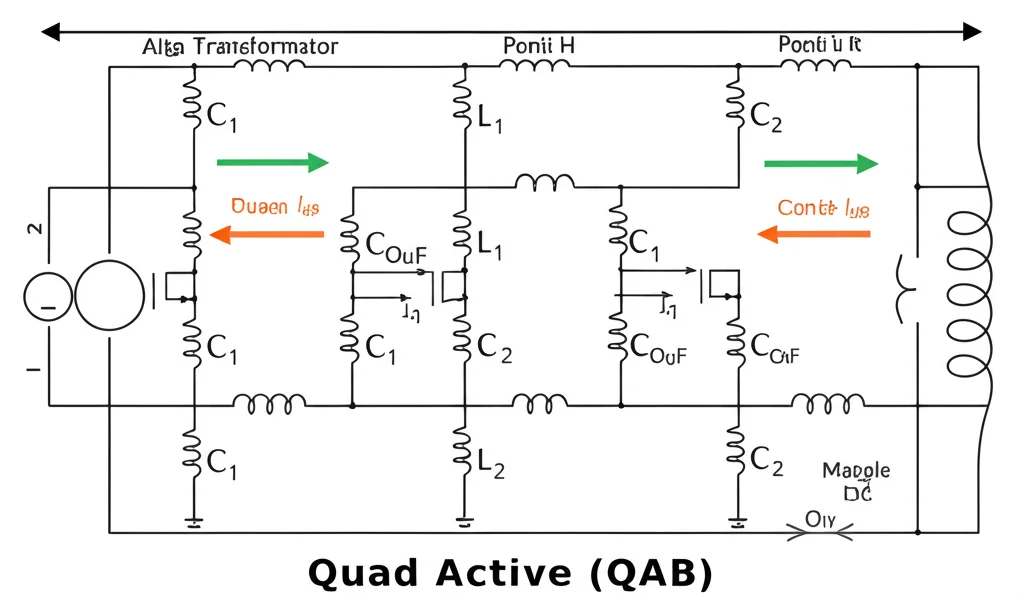
Immaginate un aereo moderno. Non è più solo meccanica e idraulica; c’è sempre più elettricità a bordo per alimentare tutto, dai sistemi di volo ai comfort per i passeggeri. Questo concetto si chiama “More Electric Aircraft” (MEA). Per gestire tutta questa energia in modo efficiente e sicuro, servono convertitori di potenza all’avanguardia. Qui entra in gioco il convertitore QAB. Pensatelo come un hub energetico super versatile: può collegare diverse fonti (batterie, generatori) e carichi (motori, avionica) che funzionano a tensioni e potenze diverse, mantenendo tutto isolato galvanicamente (una sicurezza fondamentale!) e condividendo persino alcune parti magnetiche per risparmiare peso e spazio. Sembra fantastico, vero?
La sfida del QAB: un puzzle complesso da controllare
Beh, come spesso accade con le tecnologie potenti, c’è un “ma”. Il QAB è una bestia complessa da domare. Ha tantissime variabili da controllare (gli “sfasamenti” tra i ponti attivi), una dinamica molto veloce e un modello matematico che fa venire il mal di testa. I metodi di controllo tradizionali, come i classici controllori Proporzionale-Integrale (PI), spesso vanno in crisi. Immaginate di dare un colpo di acceleratore improvviso (un cambio di carico brusco): questi controllori possono causare fastidiose sovraelongazioni o sottoelongazioni della tensione, hanno una risposta dinamica un po’ lenta e, peggio ancora, i diversi “porti” del convertitore tendono a influenzarsi a vicenda (il cosiddetto “accoppiamento”), rendendo il controllo ancora più difficile. È come cercare di dirigere un’orchestra complessa dove ogni musicista fa un po’ di testa sua!
La nostra soluzione: l’MDCS-MPC, il direttore d’orchestra intelligente
Ecco dove entra in gioco la nostra idea: una strategia di controllo chiamata Moving Discretized Control Set-Model Predictive Control (MDCS-MPC). Lo so, il nome è un po’ tecnico, ma l’idea di base è geniale e, lasciatemelo dire, funziona alla grande! In parole povere, questo controllore non si limita a reagire agli errori passati come fa un PI, ma prevede cosa succederà nel prossimo futuro. Utilizza un modello matematico del convertitore QAB per anticipare come le tensioni e le correnti cambieranno in base alle decisioni di controllo (gli sfasamenti).
Il bello è che questo approccio ci permette di:
- Ottenere una risposta dinamica fulminea: il sistema reagisce ai cambiamenti quasi istantaneamente.
- Eliminare gli errori a regime: la tensione e la corrente raggiungono esattamente il valore desiderato senza fastidiose deviazioni.
- Adattarsi a diverse condizioni operative: grazie al modello integrato, funziona bene in un ampio range di potenze e tensioni.
- Ridurre il carico computazionale: abbiamo introdotto un “passo adattivo” intelligente. Quando il sistema è lontano dall’obiettivo, il controllore fa passi più grandi per arrivarci in fretta; quando è vicino, fa passi più piccoli e precisi. Questo riduce drasticamente i calcoli necessari rispetto ad altre tecniche predittive come l’FCS-MPC, rendendolo fattibile per l’implementazione pratica.
- Disaccoppiare i porti: riesce a gestire ogni porta in modo indipendente, evitando che i disturbi su una si propaghino alle altre.
Mettere alla prova l’MDCS-MPC: Simulazioni e HIL
Ovviamente, non ci siamo fidati solo della teoria. Abbiamo messo alla prova il nostro MDCS-MPC in due modi. Prima, con intense simulazioni al computer (MATLAB/Simulink). Abbiamo simulato il comportamento del QAB in varie condizioni: funzionamento stabile, cambi di carico improvvisi (dal 100% al 0%, poi al 120%, e così via), variazioni della tensione di alimentazione e dei riferimenti di tensione. Abbiamo confrontato le prestazioni del nostro MDCS-MPC con quelle di un controllore PI tradizionale (con tecniche di disaccoppiamento). I risultati? Netta superiorità del MDCS-MPC! La risposta dinamica era molto più rapida, le sovraelongazioni e sottoelongazioni di tensione erano praticamente assenti, e l’accoppiamento tra i porti era quasi inesistente. Addirittura, abbiamo visto una riduzione della potenza reattiva, il che significa maggiore efficienza.
Ma le simulazioni, per quanto utili, sono pur sempre virtuali. Volevamo una prova più “reale”. Per questo, siamo passati all’Hardware-in-the-Loop (HIL). Abbiamo usato una piattaforma potentissima, la Typhoon HIL 602, che permette di simulare il convertitore QAB in tempo reale, mentre il nostro algoritmo di controllo MDCS-MPC girava su un vero processore (un DSP TMS320F28335), proprio come farebbe in un’applicazione reale. È il massimo che si possa fare in laboratorio prima di costruire il prototipo fisico.
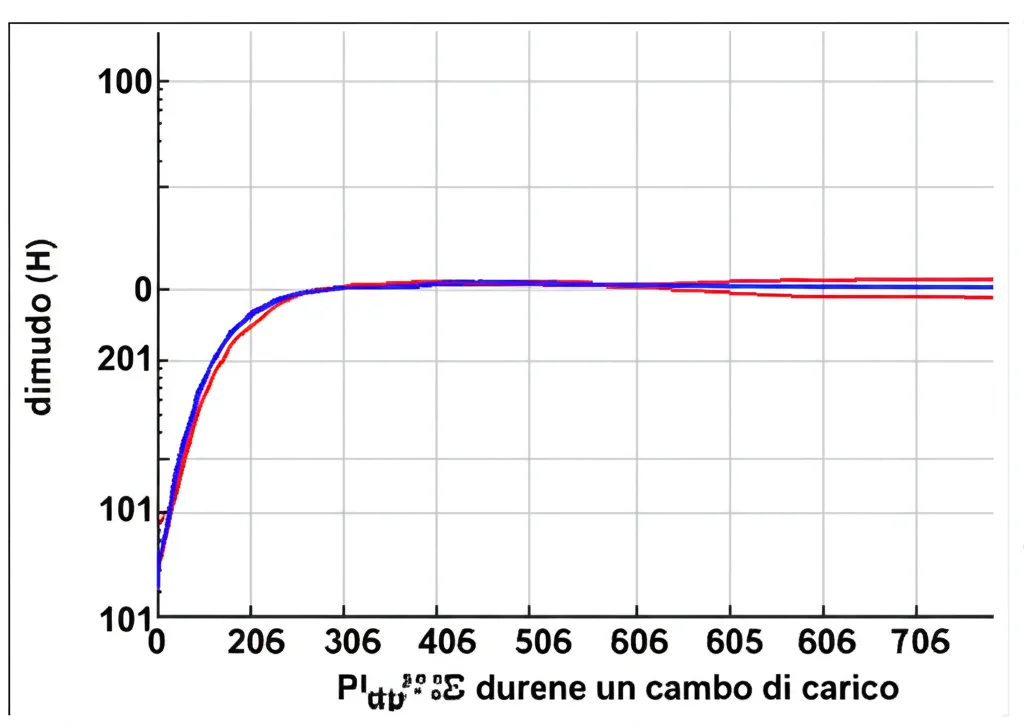
Ebbene, i risultati HIL hanno confermato in pieno quanto visto nelle simulazioni! Abbiamo ripetuto i test di cambio di carico e variazione dei riferimenti. Con l’MDCS-MPC, le tensioni rimanevano stabili, con risposte rapide e pulite. Quando un carico cambiava su una porta, le altre quasi non se ne accorgevano. Al contrario, con il controllo PI, si vedevano ancora sovratensioni significative (fino a 60V in alcuni test!), tempi di risposta più lenti (fino a 0.6 secondi per stabilizzarsi!) e un chiaro accoppiamento tra le porte. Anche la resistenza ai disturbi sulla tensione di alimentazione era nettamente migliore con il nostro approccio.
La ciliegina sulla torta: l’efficienza
Un altro aspetto fondamentale, specialmente in aeronautica, è l’efficienza. Abbiamo misurato l’efficienza del convertitore con entrambi i metodi di controllo. Risultato: con il PI, l’efficienza di picco era del 94.4%; con il nostro MDCS-MPC, abbiamo raggiunto il 96.5%! Un miglioramento significativo che si traduce in meno sprechi di energia e meno calore da dissipare.
Perché il nostro MDCS-MPC è speciale?
Esistono altre forme di controllo predittivo, anche per convertitori simili (come il Dual Active Bridge, DAB). Tuttavia, molte di esse soffrono ancora di elevata complessità computazionale, richiedono frequenze di switching variabili (che complicano il filtraggio) o non sono state specificamente adattate e ottimizzate per le sfide uniche del QAB multi-porta. Il nostro lavoro si distingue per aver sviluppato un MDCS-MPC specifico per il QAB, bilanciando prestazioni dinamiche eccellenti, robustezza, disaccoppiamento efficace e un carico computazionale gestibile grazie al passo adattivo e alla funzione di costo ottimizzata. Abbiamo anche integrato un meccanismo di compensazione dell’errore per rendere il controllo ancora più preciso, correggendo eventuali piccole discrepanze tra il modello e la realtà.
Conclusioni: un passo avanti per gli aerei del futuro
Quindi, cosa abbiamo dimostrato con questo lavoro? Che la strategia MDCS-MPC è una soluzione davvero promettente per controllare i convertitori QAB nelle applicazioni aeronautiche “More Electric”. Offre una risposta dinamica superiore, elimina quasi del tutto sovratensioni e sottotensioni, garantisce un ottimo disaccoppiamento tra le porte, resiste bene ai disturbi ed è più efficiente dei metodi tradizionali. Il tutto con un carico computazionale ragionevole, grazie alle ottimizzazioni che abbiamo introdotto.
Siamo convinti che questo tipo di controllo intelligente sia fondamentale per realizzare la visione degli aerei più elettrici, più efficienti e più affidabili del futuro. È stato un viaggio affascinante sviluppare e testare questa tecnologia, e i risultati sono davvero incoraggianti!
Fonte: Springer





